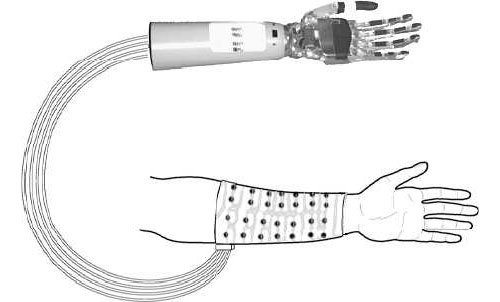
Our goal is to develop a wearable sleeve interface, we call a "biosleeve", to track arm and finger motions and muscle forces. The biosleeve would have an integrated array of surface electromyogram (EMG) sensors to measure muscle activity in the forearm corresponding to finger movements and forces, and several inertial sensors to track larger movements of the operator's arm and hand. This combined use of sensors has advantages that can complement or replace conventional teleoperation interfaces (e.g., cybergloves): it does not obstruct the operator's hands, allowing more natural manipulation and sensory feedback, and it provides a measure of intended force from individual fingers
and power grasps. Successful biosleeve technology will benefit multiple NASA applications including dexterous telemanipulation, gesture recognition, and force-controlled power-assisted EVA gloves.