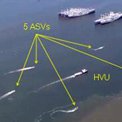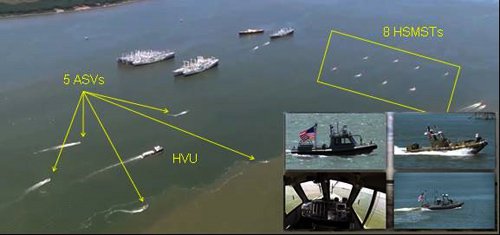
An aerial view of the ONR Swarm demonstration.
An autonomous control technology developed by JPL called CARACaS (Control Architecture for Robotic Agent Command and Sensing) was selected under previous Office of Naval Research (ONR) funding to serve as the autonomy backbone of several unmanned maritime systems (UMS). In this task, JPL is building upon the perception and autonomy technology previously demonstrated using CARACaS to prepare UMSs for mission operations that are more complex and more autonomous. The technology developments and demonstrations can be grouped into three categories: Situational Awareness, Safe Navigation, and Mission Operations. Advanced Situational Awareness (SA) will provide UMSs a complete and robust view of their environment, with an emphasis on using EO/IR sensing of surface vessels. Developments in Safe Navigation will use the UMS’s more complete SA picture for motion planning and hazard avoidance, including continued application of the International Regulations for Preventing Collisions at Sea (COLREGS). Mission Operations will emphasize multi-vehicle coordination, dynamic high-level mission planning, and adaptive/multi-objective prioritization to support a variety of UMS mission scenarios, as well as support of specific mission scenarios for demonstration.
As an example mission operation completed under this task, JPL provided CARACaS to serve as the core autonomy technology for the ONR Swarm demonstration (
YouTube video) on the James River in Virginia (photos below). The exercise was requested by the Chief of Naval Research to demonstrate the increasing capabilities of Unmanned Surface Vehicles (USVs), emphasizing the maturity of the autonomy technology and ability for multiple USVs to coordinate their behaviors. The example mission scenario included the escort of a high value unit (HVU) and the interception of an intruder.