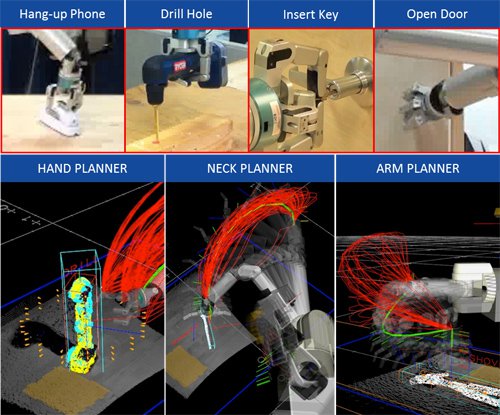
Across the top are shown several representative pictures taken during execution of autonomous manipulation activities as indicated. The bottom row shows graphical representations of object recognition and localization, as well as possible trajectories evaluated for the hand, neck, and arm in the system.
This task is funded by the DARPA Autonomous Robotic Manipulation Software program. The objectives are to enable a robot to autonomously identify, grasp, and manipulate objects, and to perform complicated tasks with humans providing only high level commanding. The ultimate goal of this program is to develop software and algorithms that could be used to assist soldiers in the field with disarming explosive devices, increasing national manufacturing capabilities, and providing everyday robotic assistance within households.
In the past year we have demonstrated the ability to autonomously recognize and manipulate tools in a partially structured environment. The tasks have included: grasping a hand drill and created a hole in a desired position of a block of wood, inserting a key into a door handle lock and unlocking it, turning a door handle and opening the door, picking and placing tools such as hammers and screwdrivers, and hanging-up a phone.
The ARM-S team includes researchers from JPL and the California Institute of Technology. As one of the leading ARM-S teams JPL/Caltech has been selected to continue into Phase II of the program. More details on the program may be found at
thearmrobot.com.







