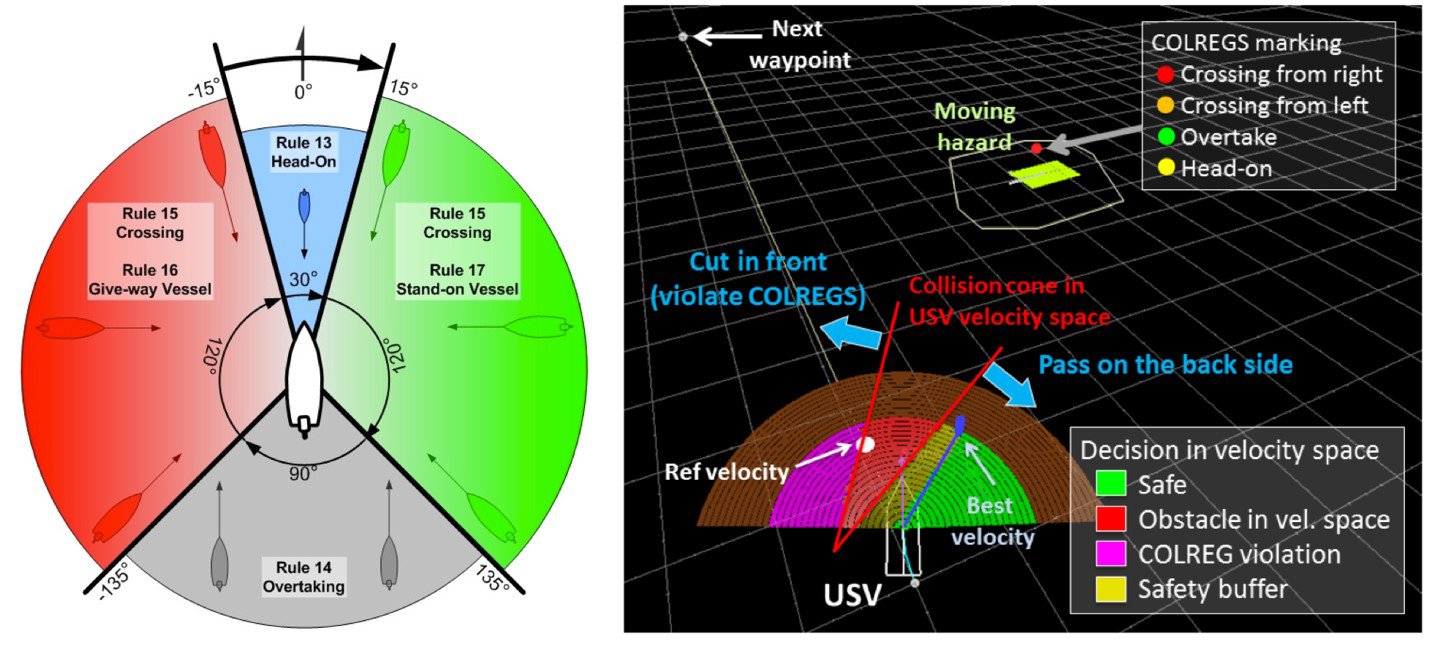
On the left is a graphical representation of the rules used for boat navigation relative to other vessels. On the right is one example of those rules in use.
Unmanned sea surface vehicles (USVs) require on-board sensing and decision making for critical safety functions such as robust, low-latency hazard avoidance. In this task, JPL continues to mature components of its Control Architecture for Robotic Agent Command and Sensing (CARACaS) autonomy architecture, for possible incorporation onto Navy USVs. In particular, the Office of Naval Research (ONR) has provided Future Naval Capability (FNC) funding for the detection and tracking of sea surface hazards and the subsequent robotic motion planning to avoid collisions with these hazards, including compliance with the maritime rules of the road as dictated by International Regulations for Preventing Collisions at Sea (COLREGS). Further, the autonomous planning capabilities must account for special circumstances such as USV operations with towed sensor arrays, degraded vehicle health, and intermittent communications with a human operator.