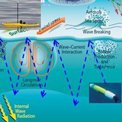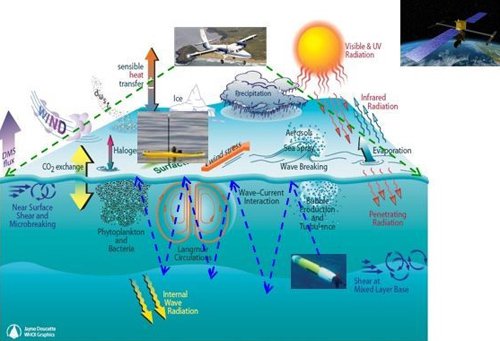
Environmental factors surrounding the sub.
This task will address innovative science mission concepts that could be enabled by an autonomous underwater vehicle (AUV) in-situ sensing system with real-time adaptive planning, control, safe navigation and sampling not currently available by traditional sampling methods of ship point sampling, moorings, profilers, gliders or AUVs. The state-of-practice AUV is to preplan the mission for 3D coarse gird surveys, do off-line data analysis then replan a reacquisition mission with finer grid survey. This approach lacks real-time response, on-board analysis and detection, and doesn’t perform system-wide reasoning.
With on-board intelligent autonomous capabilities for managing the system and its resources and monitoring dynamic features such as mixed layer variability, the system will be able to perform self-contained sensing and decision making allowing it to self-adapt and respond optimally to changes in resources, science opportunity alerts, mission goals, environmental conditions and system health faults.
The primary objective of the three-year task is to demonstrate proof-of-concept AUV in-situ sensing system with on-board autonomous capabilities for monitoring of mixed layer variability (and its relation to upper ocean carbon cycle). The capabilities will include dynamic mission planning, autonomous behaviors and control, safe navigation, real-time sampling rate adaptation and vehicle path refinement.