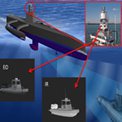
The overall objective of the DARPA Anti-Submarine Warfare Continuous Trail Unmanned Vessel (ACTUV) Program is to demonstrate technical feasibility of a beyond-state-of-the-art cognitive capability for trailing quiet diesel-electric submarines for long periods of time from an autonomous surface vehicle (ASV). During the course of an extended mission, the ACTUV may need to operate in a quiet mode without the use of active sensors such as RADAR. Passive systems that would be used in such a quiet mode could possibly include high-resolution stereo and 360-degree sensing operating during the day and night.
High-resolution stereo and 360-degree sensing systems for day/night operations will be designed during the first phase of the project. This development will be coupled with the design of algorithms for analysis of the images produced by these systems in order to characterize the other vessels and hazards present in the surrounding maritime environment, to determine their possible intent, and to employ the appropriate behaviors to keep the ACTUV safe. The sensing and behavior systems will be tested first on the water using surrogate boats, and then integrated onto the ACTUV platform for further at-sea testing.