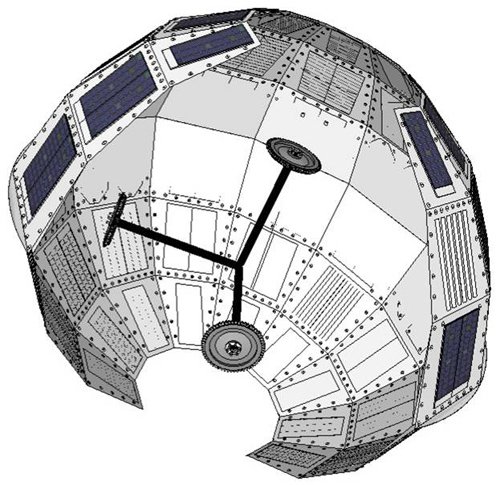
The robot will be sealed in one enclosure and actuated through three mutually orthogonal flywheels.
Small bodies such as comets, asteroids, and the Martian moons Phobos and Deimos are a category of objects whose significance has been highlighted in the recent Decadal Survey Report Visions and Voyages (NRC). Their exploration would significantly contribute to constrain the Solar System chemistry and temperature, and would shed light on the early processes in the Solar nebula. To this purpose, JPL is developing a minimalistic robotic platform for the in situ exploration of small bodies that has minimal complexity and is capable of large surface coverage as well as finely controlled regional mobility. The explorer will be a small, multi-faceted enclosed robot with external spikes and internal actuation.
Potential missions that could benefit from this platform would include: 1) Missions for the in situ characterization of water content of Phobos and/or Deimos. Given their small size/mass, it may be possible to deploy multiple such platforms in a single mission, thus providing redundancy. 2) Precursor robotic missions to explore near Earth objects.

