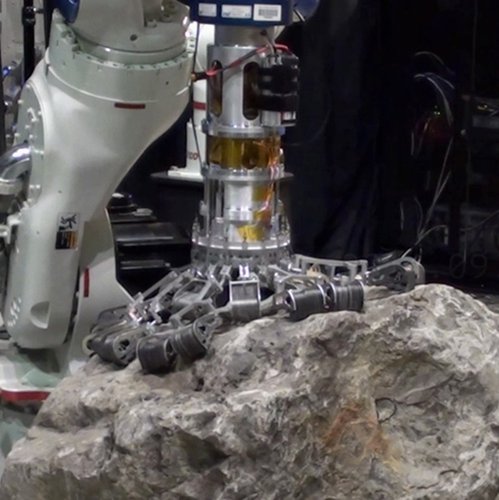
A prototype of the ARM gripping tool attaching to a rock in the lab.
The proposed Asteroid Redirect Mission (ARM) is expected to use solar electric propulsion to return a boulder from a near Earth Asteroid. To acquire the boulder from the surface of the asteroid, the spacecraft would use two dexterous robotic arms with Microspine Grippers as end effectors. The Microspine Grippers include a rotary percussive drill mounted down the center of the gripper. After drilling a hole, this drill also cuts a groove in the bottom of the borehole to create a permanent anchor. Anchored contacts offer many advantages. With a fixed anchor, arbitrary forces (and torques) can be resisted through friction, compressive, and adhesive reactions. With a sufficiently strong anchor, a single contact could be used to grab the boulder and free it from the surface. Using two anchored contacts (as is the baseline for ARM) provides redundancy and operational flexibility, as well as reducing the necessary anchor strength of each contact. Microspine Grippers offer an attractive way to create anchored contacts on natural rock surfaces because they conform to the arbitrary roughness of the surface wherever they are placed and distribute the anchor forces across the grippers footprint. They require no preload with the surface to initiate, actuate in only a few seconds, and can be released from the surface with near-zero force in abort scenarios.
A video of the proposed ARM mission concept can be viewed
here.
People on this Task
Vladimir Arutyunov

