
JPL Robotics led the development, testing, and operations of the IDS. This subsystem is comprised of the Instrument Deployment Arm (IDA), arm-mounted Instrument Deployment Camera (IDC), lander-mounted Instrument Context Camera (ICC), and control software. IDS was responsible for precision instrument placement on a planetary surface, enabling scientists to perform the first comprehensive surface-based geophysical investigation of Mars.
The IDA is a robotic arm with a 1.9-m reach and four degrees of freedom: yaw (shoulder azimuth) and three pitch joints (shoulder elevation, elbow, and wrist). Each joint has a temperature sensor and heater with a dust seal to prevent contamination of the motor and gearbox. The IDC allows visual confirmation of deployment steps, as well as acquisition of the stereo image pairs used to create a 3D map of the workspace. It also provides engineering images of the solar arrays, payload deck, and instruments. The ICC provides context images and redundant imagery of the worksite.
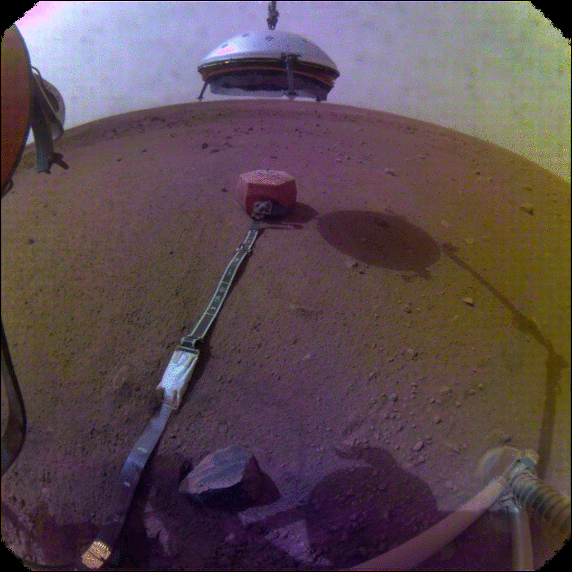
Figure 1: A view of WTS deployment from the ICC (left), and a sequence of three graphics representing WTS deployment (right).
Post-deployment Activities
After deploying the science instruments, the IDS has helped with additional commissioning of the science instruments, imaging for scientific investigations, and with cleaning the lander’s solar panels. The IDS played a pivotal role in helping the mole, a self-hammering heat probe that is part of the HP3, penetrate below the Martian surface (Figure 2). The IDS also buried a portion of the SEIS tether, scooping Martian regolith and dumping it onto the tether (Figure 3). This helps to reduce noise, caused by thermal and wind induced motion, from the SEIS measurements And, as dust coats the lander’s solar panels and available energy decreases, the IDA has helped to clean the solar arrays by dumping regolith near the arrays. The wind blows sand grains across the arrays. With each impact on the solar array, the sand grains kick up dust from the array surface and the wind blows it away (Figure 4).
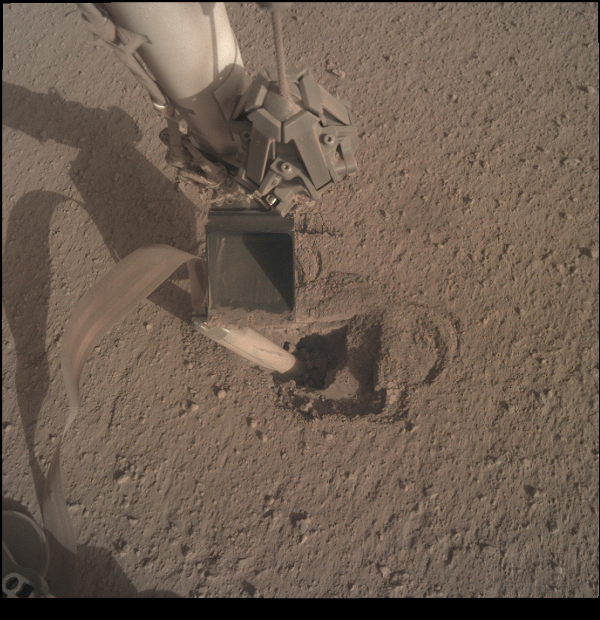
Figure 2: A view from the IDC of the IDA pressing against the back of the HP3 mole as it hammers into the Martian surface.
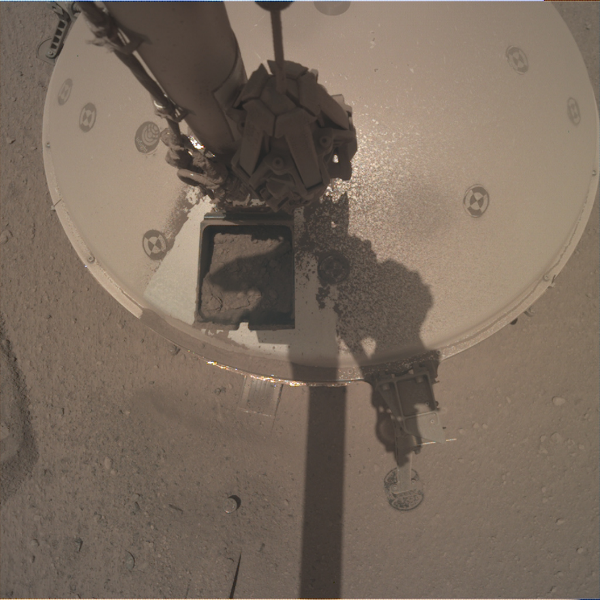
Figure 3: A view from the IDC of the IDA preparing to dump a scoopful of Martian regolith onto the SEIS tether.
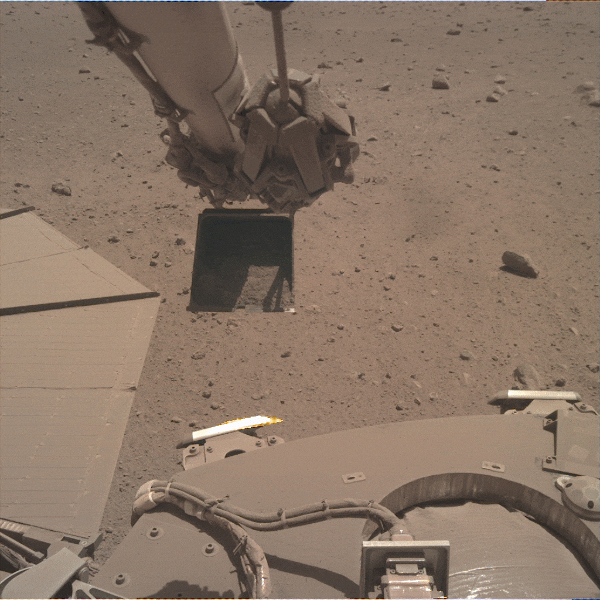
Figure 4: A view from the IDC of the IDA dumping Martian regolith on the lander deck near the West solar array. Dust on the solar array blows away in the wind as sand grains from the dumped regolith impacts the array.