
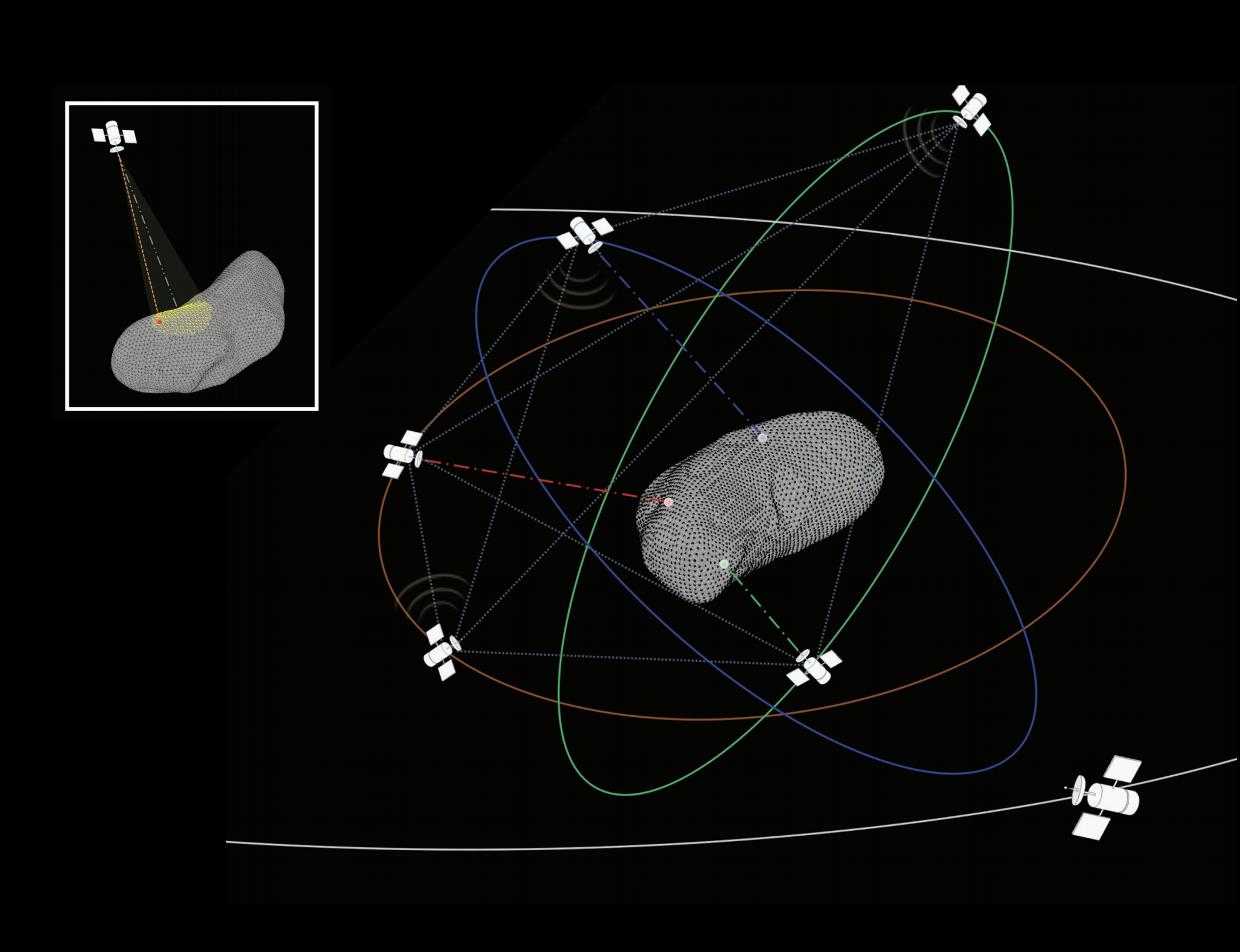
The Integrated Communications and Control, a STMD sponsored project in collaboration with Colorado School of Mines, demonstrated how a team of spacecraft can collaboratively explore a dynamic small body, maximizing the science return while considering realistic inter-spacecraft communication throughput that is a function of spacecraft states.
A collection of two to as large as thousands of robots and spacecraft can autonomously work together to conduct tasks that a single monolithic spacecraft cannot perform. The flexible size, coordinated[1] movement, and redundancy enable scientific measurements that are otherwise impossible. Enabling technologies for such distributed space systems are of strategic importance to JPL and are part of the NASA autonomy technology needs.
The robotic systems section has been developing and maturing such distributed autonomy technologies that enable effective teaming of various robotic assets. These technologies range from low TRL research on fundamentals of coordination[2] of a large swarm, e.g. swarm instabilities [link: swarm instabilities] and swarm motion planning [link:ML swarm motion], to higher TRL distributed autonomy software frameworks and algorithms that are deployed on real-life robots and field tested. The ONR sponsored USV Swarm [link: usv swarm] project, the DARPA funded SubT and resulting Nebula software [link: SubT], and the NASA STMD GCD funded A-PUFFER [link: A-PUFFER] are examples of such mid to high TRL technology maturation.

Cooperative Autonomous Distributed Robotic Exploration (CADRE) predecessor, the Autonomous Pop-Up Flat Folding Explorer Robots , or A-PUFFERs, collaboratively explore the Mars Yard at NASA's Jet Propulsion Laboratory.
Cooperative Autonomous Distributed Robotic Exploration (CADRE) flight mission is currently underway to mature and demonstrate multiple robots carrying out a mission as an autonomous, cooperative team on the surface of the moon. Our team is also working on various other multi-robot and multi-spacecraft autonomy concepts including spacecraft swarm technology demonstration with Caltech’s Center for Autonomous Systems and Technology (CAST).
The Maritime and Multi-Agent Autonomy (347N) group [link: multi-agent autonomy group] has been at the forefront of swarm autonomy technology development and maturation and is working alongside colleagues from across JPL, industry, and academia to address gaps and expand technology needs in this area.

JPL’s Control Architecture for Robotic Agent Command and Sensing (CARACaS) cooperative autonomy software enables a team of autonomous surface vessels to collaboratively patrol a harbor as part of an ONR sponsored technology demonstration.