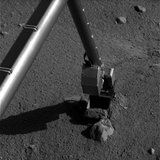
Mars deep drill bottom hole assembly prototype with percussion bit.
Subsurface access is an essential feature of planetary exploration for both scientific understanding and in situ resource utilization. Water, in particular, is extremely valuable as both a science target and resource.
It is generally accepted that the geologic history of a region can be discerned from careful study of an appropriate selection of unweathered rock samples. Similarly, the study of ice layers can provide important information on the climate history of the planet. Finally, on a number of planetary bodies, penetration of both rock and ice is needed to reach areas deep below the surface where liquid water is thought to exist and possibly harbor life.
For in situ resource utilization, the first step is similarly the assay of appropriate samples. Reaching and securing such samples will likely require subsurface access.
Near-term lunar and planetary missions are often envisioned to secure samples from depths of a few centimeters to a meter or so, but many of the key scientific questions can be answered only by drilling to depths comparable to those attainable on Earth (e.g., kilometers). For example, Mars and several of the moons of Jupiter are thought to have liquid-water aquifers at depths of a few to many kilometers. Such aquifers probably represent the only plausible abode of extant extraterrestrial life in the solar system.

JPL has worked on a variety of subsurface-access concepts for different applications. The Mars Subsurface Explorer project, also known as the Mars deep drill, aims at developing a wire-line drilling approach based on a custom CO2-powered percussive Down-The-Hole (DTH) drill design which is capable of penetrating deep (100 m target, >1 km possible) into the Mars Subsurface environment within the mass, power, planetary protection, and cost constraints realistic for near-term robotic Mars missions. The scientific goal focuses on finding life within the subsurface environment, either through the removed borehole cuttings, by finding underground liquid water, or providing a platform (i.e. the borehole) for scientific exploration. Through the technology development process, the project will: demonstrate successful drill operation up to depths of 100 m during field tests in relevant terrain; and develop a high level system architecture that fits into a 50-100 kg payload and 100 W power budget. The team has built numerous prototypes, with the latest including an active percussion and rotation system that is powered by

Self-contained Pile Driver' able to penetrate to 8-m depth in sand in a few hours.
TRUCELS is a Chevron-JPL Alliance sponsored project that aims at developing a robotic system to surveil lateral hydrocarbon wells. The robot’s ultimate objective is to traverse approximately four miles in a week’s time repeatedly over its lifetime of two years, while measuring pressure, temperature, flow rate and composition of a three-phase, three component (i.e. crude oil, water, and hydrocarbon gas) flow within a well at pressures exceeding 5,000 psi (340 atm) and 75 degrees C. The team has built two prototypes, BADGR-1 and BADGR-2 (Below-ground Autonomous Data Gathering Robot) as part of the technology development process. BADGR-2 was tested at an intermediate requirements level at Southwest Research Institute (SwRI) in San Antonio, TX. The test consisted of demonstrating robot movement and sensor functionality in three phase/component flow at 1300 psi (88 atm) and ambient temperature. Both sensors and mobility systems were demonstrated to function at pressure under three phase, three component flow. This project consisted of an effort across a number of sections at JPL, including 347, 389, 4x, 355, and 393.
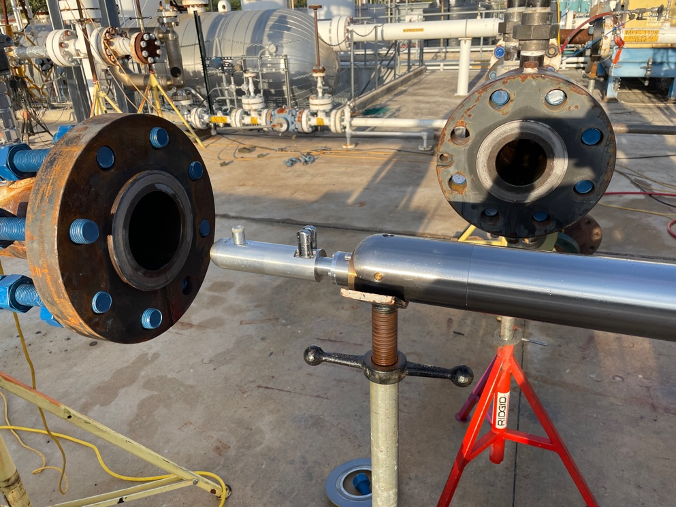
TRUCELS Close up on sensor section that includes the laser doppler velocimeter and hold-up probes
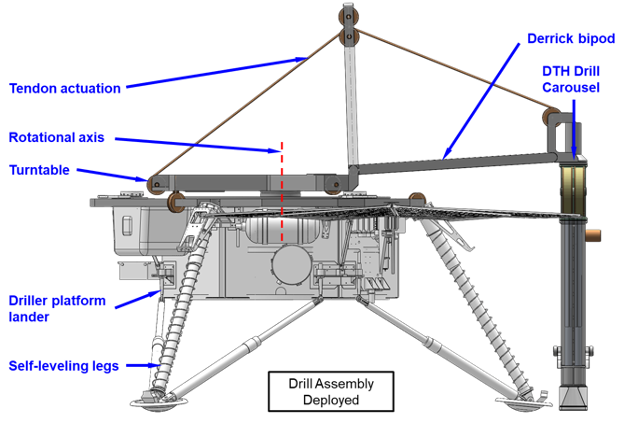
concept lander mission with the deep drill down the hole (DTH) assembly.