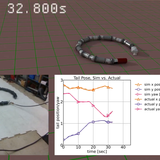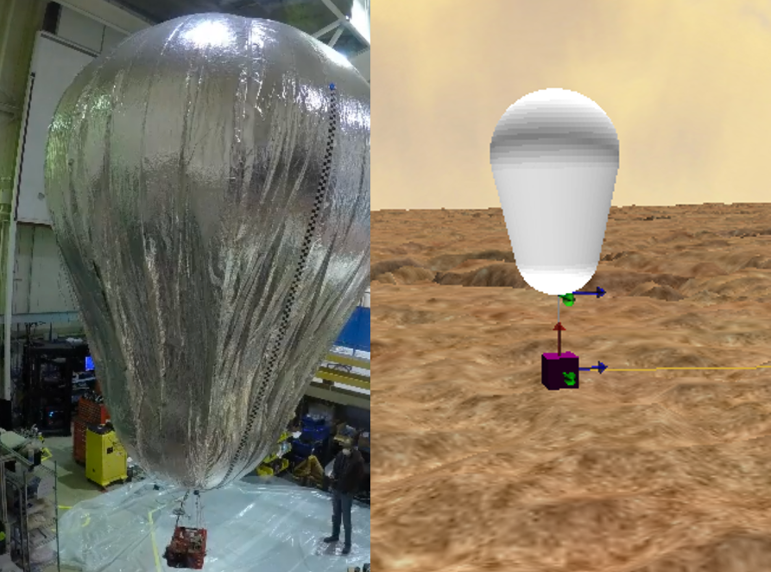
Figure 1. Experiment, and rendering of Venus aerobot.
The JPL Mobility and Robotic Systems Section has a broad spectrum of physics-based modeling, simulation, and rendering capabilities in support of orbital, surface, sub-surface, and near-surface robotic-exploration technologies and missions.
High fidelity and integrated approaches for modeling and simulation of complex dynamic systems can provide more precise data on expected behavior of spacecraft, in conjunction with the vehicle autonomy. Modeling of spacecraft and robotic vehicles on planetary bodies encompasses addressing multiple dynamics domains and multiple scales of time and space. There are often interactions between these domains that require an integrated approach to modeling and simulation, involving rigid and flexible multibody dynamics, and guidance, path planning, and control. For example, the motion of a rover on the terrain, its location on the planetary body, the location of the planetary body with respect to the Sun, the surface albedo, the geometry of the surrounding terrain, local atmospheric conditions, and many other parameters affect the flexible multibody dynamics of the vehicle. Some of these parameters also determine the thermal and power dynamics of the rover by affecting the power generated by solar panels on the rover, its battery performance, and its heating or cooling.

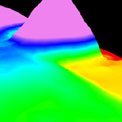
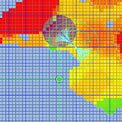
Fig. 2: Plan view of terrain evaluation from the MER GESTALT navigation algorithm running under simulation.
A family of modeling tools and modeling approaches supports mission domains that include exploration of planetary bodies around and near the surface of the body. Around the body, models are needed for mission phases involving single and multiple spacecraft, from small spacecraft such as CubeSats to larger spacecraft with deployable components, including in-space assembly, servicing, and proximity operations enabling remote sensing and characterization of unexplored planetary bodies. Near the surface, models are needed for mission phases with planetary rovers, sample acquisition and handling with robotic arms and manipulators, atmospheric entry and descent with parachutes and retro-propulsion and precision landing, terra-mechanics, hydro-mechanics, aero-mechanics, and mobility platforms from micro-gravity to full-gravity and from atmosphere to no atmosphere, such as aerobots (Venus balloon) and drones (Mars helicopter), surface and sub-surface exploration with legged (Robosimian), wheeled (many rovers such as CADRE, Curiosity and many others), snake-like (EELS), and hopping locomotion.
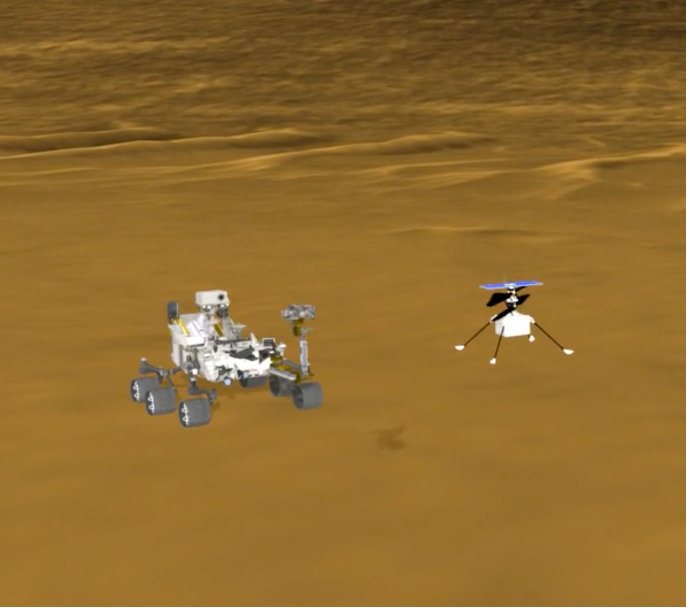
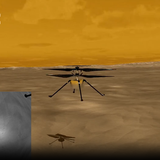
Figure 3. Rendering of Curiosity rover in simulated Mars terrain, with Mars helicopter.
Our models and simulations are used in a number of ways, for Research and Technology Development, and in support of Flight Projects.
- For Future Mission Concept research, new concept and technology-development activities typically develop models to assist in the design trades and performance analysis of the robotic system. CAD models are used for platform design of systems such as rover vehicles and manipulators. Areas of application of modeling and simulation include Surface Mobility (extreme terrain access), In-Space Applications (comet and asteroid sampling, in-space robotic assembly), Aerial Mobility (balloons and rotorcraft).
- For Robotics Terrestrial Applications research, we model and simulate very diverse applications such as: Maritime Systems including sensing and control of autonomous vessels, and underwater and intelligent manipulation and teleoperation; Design and control of limbed and wheeled systems; Teaming systems on Land and Sea; and Subterranean systems.
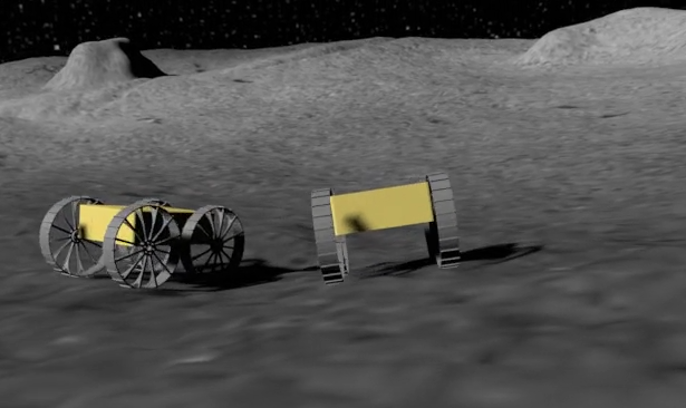
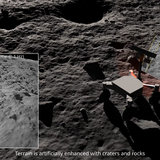
Figure 4. Rendering of CADRE rovers on the Moon's surface.
For flight project support, modeling and simulation takes place at different stages of the mission life cycle:
- Autonomy algorithm development: Algorithm development for autonomous navigation, manipulation, safe-landing and aerobot systems are developed and evaluated using physics-based models. The simulations for these cases can involve optimization (e.g. genetic algorithm) techniques for tuning the performance on workstations and high-performance clusters.
- Mission analysis and design: Mission analysis has been used for landing, where Monte Carlo simulation is used to derive statistical performance metrics. Simulation models of sensors, mobility-platform kinematics and dynamics, atmospheric and surface environments, cameras, sensors and actuators, and terrain environments are all used as components of integrated models.
- Onboard-software integration and testing: When algorithms are implemented as onboard software, they are run on robotic hardware platforms and test beds as a key part of their performance evaluation. However, such testing can be time-consuming and expensive, and is often limited to a narrow spectrum of environments. Closed-loop simulations complement such hardware test beds, and provide a cost-effective way to test and integrate the onboard software across a wide range of operational scenarios.
- System verification and validation: The simulators are also designed to provide good real-time performance for verification and validation, where interfaces must be faithful to the hardware platforms. Thus, minimal effort is needed to switch the onboard software between the physical and simulation test beds.
- Mission operations: Simulation models are also used extensively during surface-mission operations, such as MSL, Insight, Mars 2020, Mars Helicopter, and many others. They are integrated into the rover-control workstations as well as into science-activity planning tools, and allow operators to design command sequences. The models help the evaluation of resource needs and sequence timing, as well as risks prior to upload and execution. The downlink telemetry is used to update the models with information about the environment and the rover state for use in the day-to-day mission cycles. Recognizing the importance of field tests in evaluating technologies and preparing for mission operations, the section is also supporting the development of a "virtual field testing in a box" capability. Such capability can provide platforms for training scientists and operators, and also allow missions to evaluate and tune operations concepts.
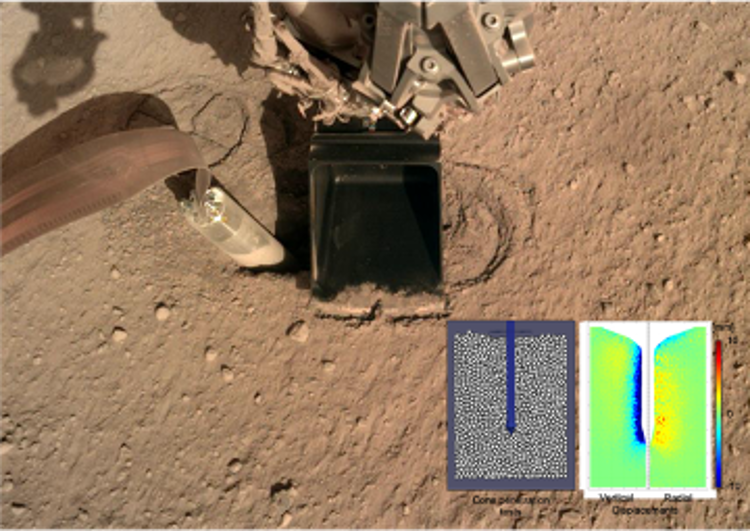
Figure 5. Insight penetration terra-mechanics model. Terra-mechanics, the study of soil properties and changes to soil due to external forces such as a rover’s wheels, anchoring devices, drills, and sample mechanisms, has increasing relevance to future NASA missions.
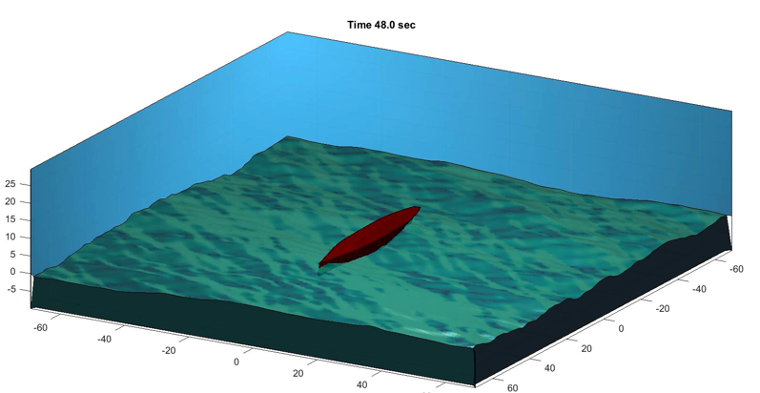
Figure 6. Example of simulations of hydro-mechanics, the study of the interaction between a vessel and the surrounding fluid.

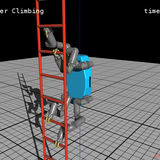
Figure 7. Rendering of EELS robot on the surface of Enceladus.