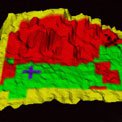
Fig. 1: Dense Structure from Motion for Rock and Slope Hazard Detection.
During planetary Entry Descent and Landing (EDL), the speed of the spacecraft is reduced from thousands of meters per second to essentially zero. EDL is challenging because of its short duration, little or no communications with Earth, and the high variability in landing-site terrain. Because a failure of any system during EDL can result in mission failure, all systems must be extremely reliable under nominal conditions and robust to unexpected conditions.
The JPL Mobility and Robotic Systems Section contributes to the research and development of EDL systems by providing computer-vision systems (algorithms and software) for terrain-relative navigation using passive imaging and active sensing. These systems assist in solving two fundamental EDL problems: Hazard Detection and Avoidance (HDA) and Pinpoint Landing (PPL). The section has also been involved with testing these systems for technology validation and flight verification.
Hazard Detection and Avoidance
There is a correlation between science return and rough terrain (e.g., the exposed bedrock in canyon walls or the rocky terrain near crater rims), so scientists prefer to investigate terrain that is difficult for landing. To enable landing in hazardous terrain, we are developing multiple HDA systems based on active and passive sensing. These systems use sensors and computing onboard the lander to detect hazards in the landing zone and autonomously select a location that is reachable and safe. The HDA systems in development are:
Pinpoint Landing
PPL systems are designed to place a payload within 10 to 100 meters of a specific location on the surface. Applications of PPL include landing at a specific scientifically interesting location (e.g., a thermal hot spot on Mars or ice on the Moon) and precision delivery of multiple assets to the surface (e.g., rover and lander for a future Mars Sample Return or components for construction of a future lunar outpost). To enable PPL, we are developing position-estimation algorithms that match landmarks detected in data collected during descent to landmarks stored in an onboard database. With these matches, the position of the lander could be determined relative to the surface. We are also developing algorithms based on feature tracking that provide the surface-relative velocity that is required to generate accurate trajectory knowledge between position measurements. The PPL systems in development are:
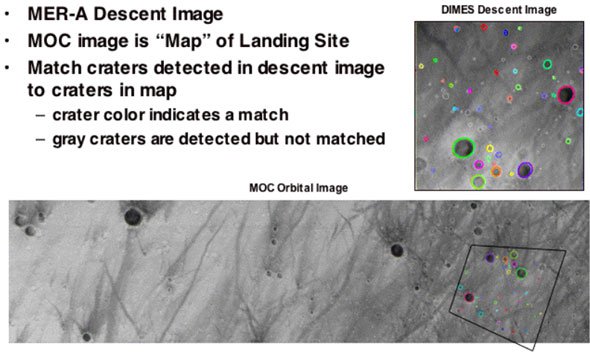
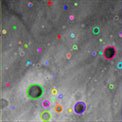
Fig. 2: Position Estimation from Crater Landmarks in Visible Imagery.
Field Testing of Terrain-Relative Navigation Systems
Field testing is very important to prove that the developed systems will work with real sensors imaging real terrain at representative altitudes. We have conducted multiple field-test campaigns to validate the performance of proposed technology, including DIMES Field Testing, Rocket-Sled Testing of Lidar Hazard Detection, Autonomous Helicopter Testing of Dense Structure from Motion, and Parachute-Drop Testing for Pinpoint Landing in Crater-Free Terrain.
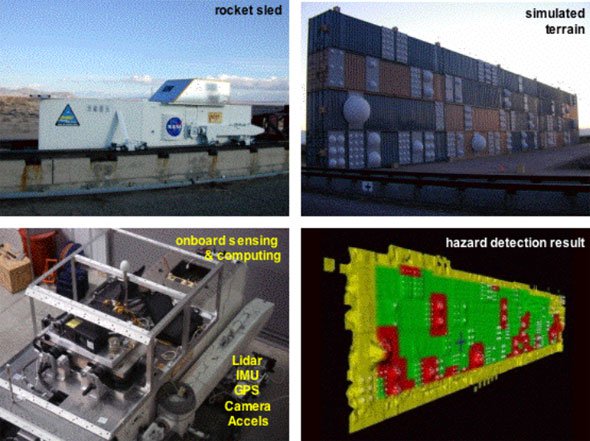
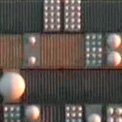
Fig. 3: Rocket Sled Testing of Lidar Hazard Detection.
The Lander Vision System (LVS) for the Mars 2020 mission is representative of the current state of the art in map-relative localization for Terrain Relative Navigation (TRN). Orbital reconnaissance imagery of Mars is available with a resolution of ~30 cm/pixel from the HiRISE camera; this is processed into maps at two resolutions, 12 and 6 m/pixel, for coarse and fine localization processes, respectively. Map-relative localization uses onboard altitude and attitude knowledge to project descent images onto the ground plane and to resample them with the orientation and pixel scale of the prior map. The resampled descent images are then registered to the map using traditional template matching techniques that conduct a 2-D search for the best match position.
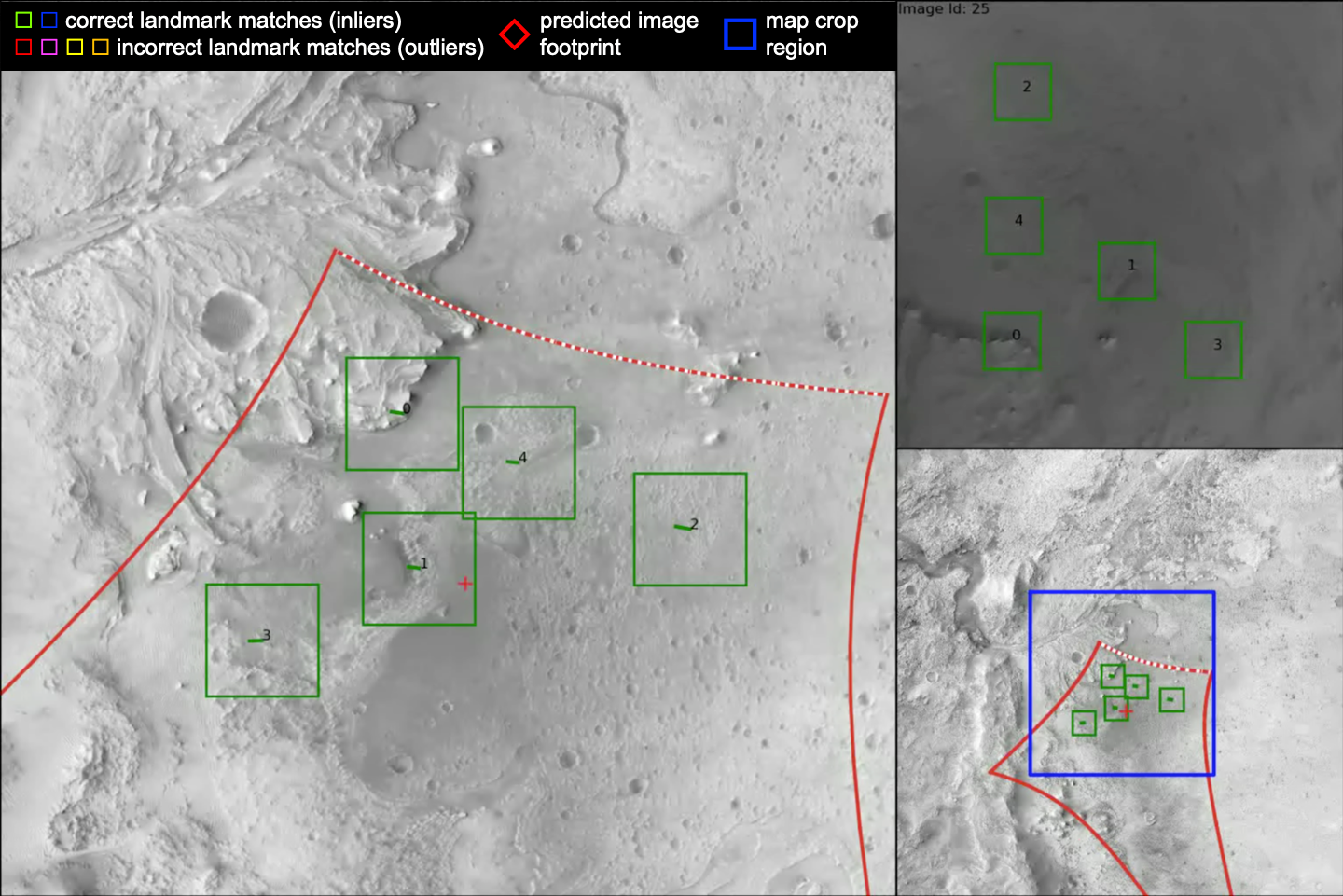
LVS Landmark matches: matches for first coarse image
TRN was an enabling technology for landing at Jezero Crater, a site that is very desirable scientifically for the Mars 2020 mission but was originally considered too hazardous for landing. On February 18, 2021, Perseverance touched down safely within 5m of the point targeted by LVS. This very low error could only have been possible if the LVS position error was low along with low errors in the on-board safe targets map and the navigation between the LVS position estimate and the ground. The low LVS position error indicates that the LVS map local distortion was low, the alignments between the sensors were accurate and the landmark correlation peaks were sharp.
TRN and LVS technologies developed for Mars 2020 are being considered for use on future missions to locations such as Mars (sample return), Europa, Enceladus, Ceres, Titan, and the moon. Lander Vision System (LVS) development was led by Section 343 with significant contributions from 347, 348, and 349.
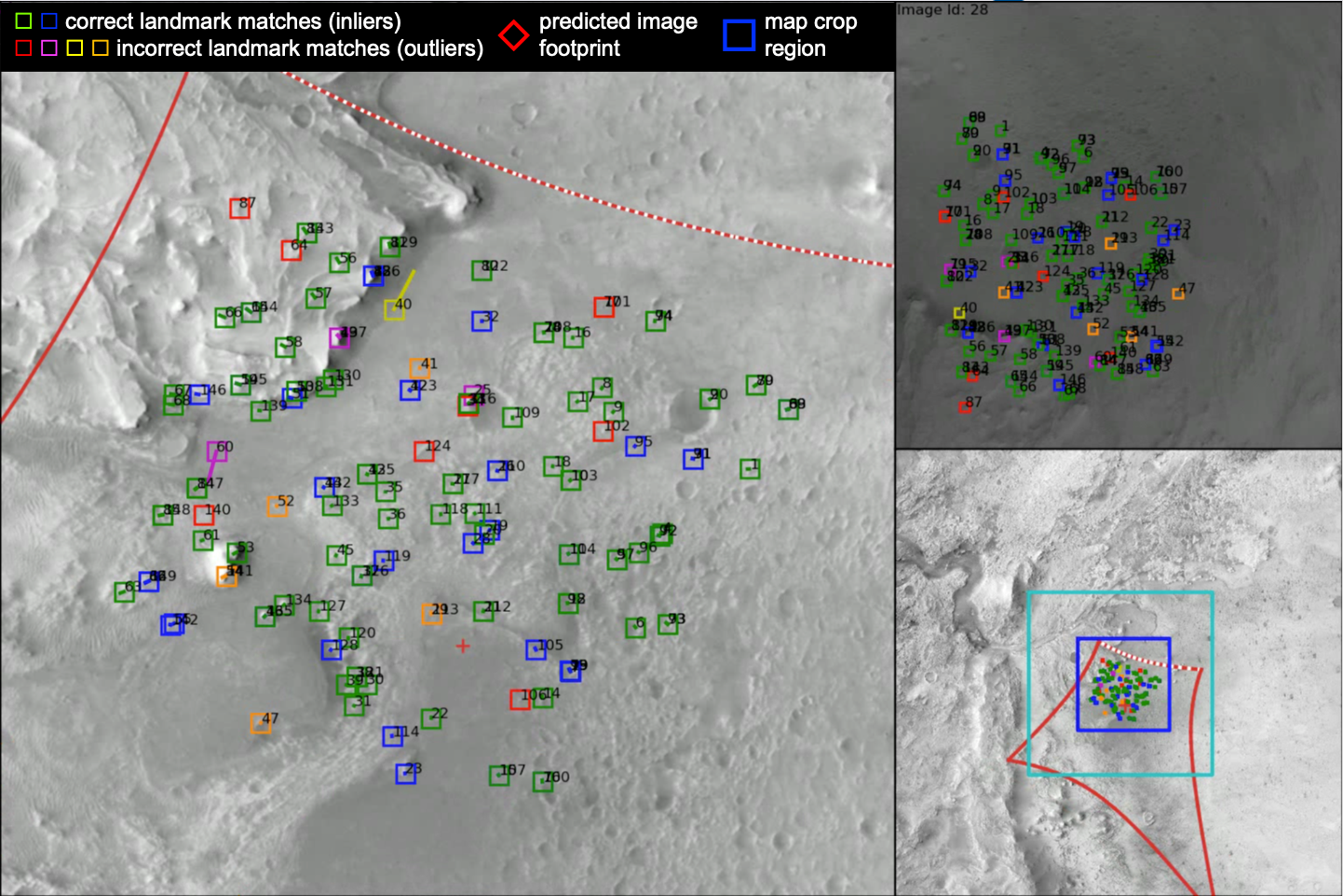
LVS Landmark matches: matches for first fine image.