Robotic surface mobility is an important component of NASA’s planetary exploration strategy. The capability to reach varied landscapes and perform in-situ science over large surface areas and at targeted sites enables investigations to gain a deeper understanding of the processes that shaped our Solar System, the climatic and geologic processes that shaped their evolution, resolve theories of the formation of extraterrestrial bodies, and enables investigations in astrobiology.
JPL’s robotic surface mobility systems have been successfully fielded on Mars in a series of missions that began with Sojourner, and have been followed by Spirit and Opportunity, Curiosity, and most recently,, Perseverance. These missions have incorporated increasingly sophisticated autonomous capabilities and ground support software. A robust research program to develop new technologies, funded by NASA and JPL, and through commercial partnerships and competed non-NASA solicitations, feeds into future planetary surface exploration missions. Through the development of new types of surface mobility systems, improved performance of both hardware and software, and greater autonomy on these platforms, robotic exploration is expanding into new and more challenging types of environments on Mars as well as to other bodies like the Moon, Europa, Enceladus, Titan, Venus, asteroids and comets.
Several innovative concepts for planetary surface mobility system, beyond the dependable rocker-bogie rovers that have been deployed on Mars, are being developed and demonstrated. The Axel rappelling rover will enable exploration of very steep slopes, lava tubes and pits on the Moon and Mars. Lemur is a robot that can climb vertical or even inverted surfaces. Hedgehog is capable of making controlled hops on the surface of small bodies where wheels cannot gain sufficient traction due to the microgravity environment. Limbed mobility platforms like RoboSimian, LLAMA and ATHLETE will be capable of exploring extreme terrain on Mars and the Moon and the rough and chaotic surface on icy moons such as Europa. EELS, a snake-like self-propelling robot, is designed to dive into crevasses or vents on Enceladus to search for extant life in its subsurface ocean hidden beneath a thick shell of ice. BALLET, a light-weight, highly stable hybrid limbed-balloon, is designed for exploring the surface of Titan.
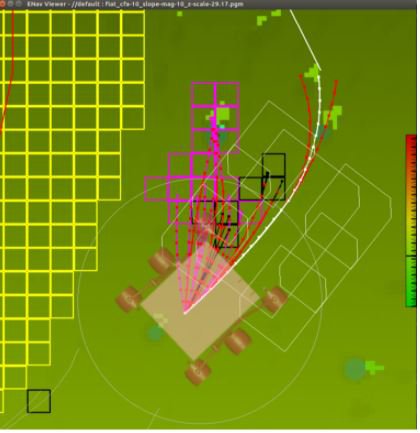
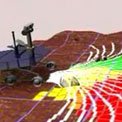
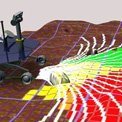
Figure 1 Learned heuristics for surface navigation.
Development of advanced software capabilities complement the development of these platforms to enable highly autonomous and self-reliant robotic platforms. Several technologies contribute to robust, reactive control systems that provide greater capability while driving in unknown terrain. Visual Odometry eliminates the uncertainty in position and attitude arising from vehicle slip or inertial-sensor drift by autonomously tracking features in images taken while driving. Visual Tracking techniques provide a robust way to reach a goal even in the presence of large position uncertainty. Active suspension systems and autonomous adaptation to the terrain for optimal mobility will reduce the energy needed and enable traverses over more challenging terrain. Applying suspension kinematics adaptation into wheel-driving algorithms has already demonstrated improved mobility on our Mars rovers. Incorporation of deep learning and knowledge-based heuristic intelligence into learning are being investigated to better anticipate terrain characteristics and appropriately navigate over varied terrain. Planning paths for extreme-terrain mobility platforms like Axel is needed to take full advantage of the platform’s capabilities.
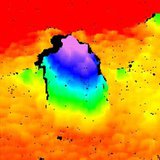
A variety of predictive technologies keep vehicles safe by avoiding potentially dangerous areas. Passive Stereo Vision or active LIDAR systems provide a geometric model of the nearby terrain in the form of a cloud of 3D points. On-board traversability analysis, performed over the terrain geometric model, uses robust estimation techniques to find step obstacles (e.g., rocks or ditches), high-tilt areas, and rough terrain. Additional terrain analyses performed on multispectral image texture or color has been demonstrated on research vehicles and provides knowledge about the type of terrain in addition to its geometry.
While the capabilities listed above all run on computer systems embedded on individual robots, we also provide systems for terrain visualization, drive planning, and drive simulation to aid humans in the operation of robotic mobility systems. High-resolution visualization of terrain is critical for planning effective drives toward specific goals. High-fidelity rover simulations provide a useful tool for "test driving" a given set of commands across a newly-visualized terrain. We also provide technologies that greatly accelerate the development of specialized mobility systems. New designs emerge from extensive field and laboratory experience with rough terrain or complex man-made environments. High-fidelity robot and environment simulations can enable early development of control algorithms while vehicles are still being designed or built. Unified software architecture for robots like the CLARAty framework, provides a framework for the development of new capabilities, and implements many component technologies like stereo-vision processing and terrain assessment. These components may then be readily incorporated into new vehicles or licensed for use with collaborators outside JPL.
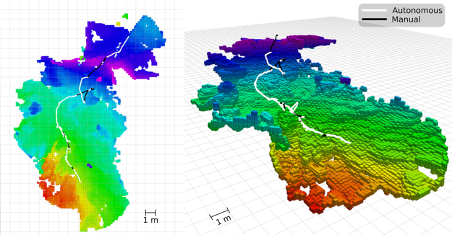
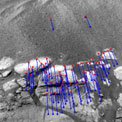
Figure 2 Path-planning for extreme-terrain Axel rover.