
Rocky 7 is research test bed for navigation and rover-based sampling. It is approximately 60 x 40 x 25 cm in size and 16 kg in mass. It has 3 stereo pairs of cameras: wide-field-of-view pairs (hazard cameras) on the front and back of the rover and a narrower-field-of-view pair (navigation cameras) on the deployable mast. The mobility system uses a variant of the rocker-bogie mechanism found on most JPL rovers. On Rocky 7, only the front wheels are steerable, while the back bogie wheels are close together and have no steering. This mobility design concept was implemented to test the maneuverability of a system with fewer actuators. These actuators were instead used in a short sampling manipulator that is stored across one end of the vehicle, and a long instrument manipulator (mast) that is stored through a slot in the solar panel. The deployed mast holds the navigation cameras at 1.4 m above ground level, providing higher-vantage-point viewing for operators or onboard algorithms.
Rocky 7 was originally built in 1996 as a next-generation design to follow Sojourner. It is approximately the same size but was given capabilities similar to its much larger predecessors to demonstrate the capabilities of landerless operation. First, a much faster computer system was used, enabling onboard stereo processing. Second, the deployable stereo camera mast provided imagery of the surrounding terrain from human-eye height, like the Pathfinder Lander. Third, the Sojourner inertial sensor system (3 accelerometers, and one z-axis angular rate sensor) was supplemented with a wide-field-of-view sun sensor -- enabling absolute heading measurements not possible otherwise. Fourth, the manipulation system enabled terrain sampling and multiple science-instrument placement.
After its initial construction, Rocky 7 was used for desert field tests in 1996 and 1997. Following that, it was used for several years of algorithm development and testing, including autonomous rock grasping, and wheel-terrain contact estimation techniques. From 2001 onward, it has been a test bed for CLARAty software development. More recently it has been considered a likely candidate for "fetch" rover studies for Mars Sample Return technology development.
In recent years, Rocky 7 has undergone major upgrades of its electronics. The original VME-based Motorola 68040 computer system was replaced with a cPCI-based 750MHz PowerPC system, which is comparable to flight systems planned for upcoming rover missions. Scheduled additional upgrades include replacing the original wire-wrapped motor-control electronics with an equivalent printed circuit board, retaining the National Semiconductor LM629 chips at its core. Also planned is a new six-axis inertial sensor, and Firewire cameras to replace the original analog versions.

Fig. 1a: Digging with clamshell scoops.
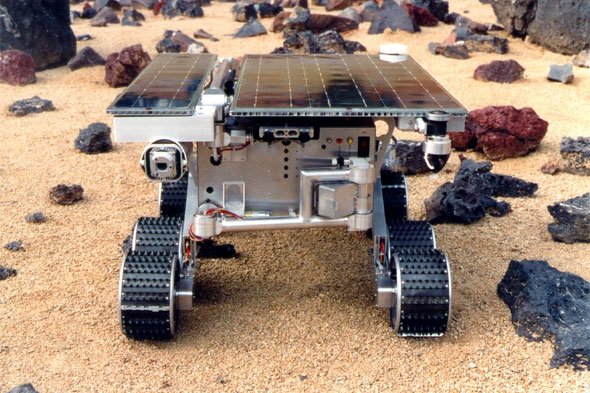
Fig. 1b: Capturing a stereo panorama.
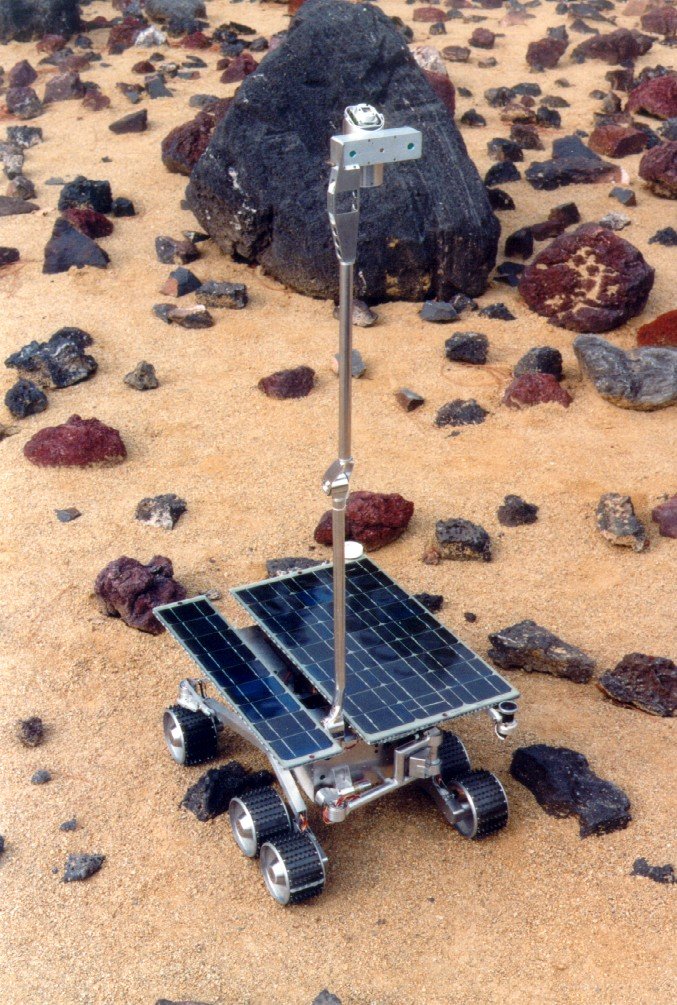
Fig. 1c: Arms stowed for driving.









