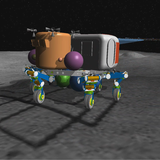
Fig. 1: 2nd generation ATHLETE unloading cargo
The All-Terrain Hex-Limbed Extra-Terrestrial Explorer (ATHLETE) vehicle concept is based on six 6 DoF (Degrees-of-Freedom) limbs, each with a 1 DoF wheel attached. ATHLETE uses its wheels for efficient driving over stable, gently rolling terrain, but each limb can also be used as a general purpose leg. In the latter case, wheels can be locked and used as feet to walk out of excessively soft, obstacle laden, steep, or otherwise extreme terrain. ATHLETE is envisioned as a heavy-lift utility vehicle to support human exploration of the lunar surface, useful for unloading bulky cargo from stationary landers and transporting it long distances.
To demonstrate this concept, several prototype vehicles have been developed for testing at JPL. The first generation ATHLETE prototype is 2.75m wide, has a maximum standing height of just over 2m, a mass of approximately 850 kg, and maximum payload carrying capacity of 300 kg in Earth gravity. Two identical prototypes were constructed in 2005 and one of these is still operational.
The second generation ATHLETE prototype was constructed in 2009 and is implemented as a coordinated system of two Tri-ATHLETEs, fully independent three-limbed robots. This innovation allows a straightforward cargo handling strategy: two Tri-ATHLETEs dock to opposite sides of a cargo pallet to form a six-limbed symmetrical vehicle, work together to move and emplace the cargo, then undock and depart. This strategy provides all the advantages of the six-limbed concept for cargo or habitat transport with the additional benefits of flexibility and modularity. The second-generation prototype is designed to demonstrate cargo handling at one half the anticipated lunar scale. The robot stands to a maximum height of just over 4m, and has a payload capacity of 450 kg in Earth gravity.
A side benefit of the wheel-on-limb approach is that each limb has sufficient degrees-of-freedom for use as a general-purpose manipulator (hence the name "limb" instead of "leg"). The prototype ATHLETE vehicles have quick-disconnect end effector adapters on the limbs that allow tools to be drawn out of a "tool belt" and maneuvered by the limb. Mechanical action of the wheel rotation also actuates the tools, so that they can take advantage of the one horsepower motor usually used for driving to instead enable drilling, gripping or other power-tool functions.
Since the vehicle has an alternative walking mode to traverse through extreme terrain, the wheels and wheel actuators can be sized for nominal, rather than worst-case obstacle climbing. There are substantial mass savings in the wheels and wheel actuators associated with designing for nominal instead of extreme terrain. The mass savings is greater than the extra mass associated with the articulated limbs. As a result, the entire mobility system, including wheels and limbs, can be lighter than a conventional mobility chassis for planetary exploration.
In 2012 a Low Gravity Testbed was created to simulate using ATHLETE to land on asteroids and small bodies. The Low Gravity Testbed consists of 3 towers with double fairlead winches that can lift the vehicle and move it in 6 degrees of freedom, under simulated gravity. Force torque sensors in the vehicle’s legs are used to detect contact with surfaces and simulate reaction forces on the vehicle. In simulating landing on an asteroid, the ATHLETE limbs are used to absorb landing energy and reduce bouncing, eliminating the need for the use of nadir pointing thrusters during the landing event which can kick up debris and contaminate the landing site.
ATHLETE is being developed by JPL as part of the Human-Robot Systems (HRS) Project managed by the Johnson Space Center (NASA JSC). HRS is one of several projects funded by the NASA Exploration Technology Development Program (ETDP) that is developing new technology in support of human exploration.

Fig 2: 1st generation ATHLETEs demonstrating cargo transport
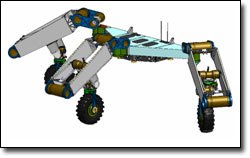
Fig 3: Model of a Tri-ATHLETE prototype

Fig 4: ATHLETE positioning a box with a gripper attachment

Fig 5: ATHLETE deploying a drill attachment on a cliff face

Fig 6: ATHLETE digging with a scoop attachment

Fig 7. ATHLETE crew standing in front of the low gravity testbed