

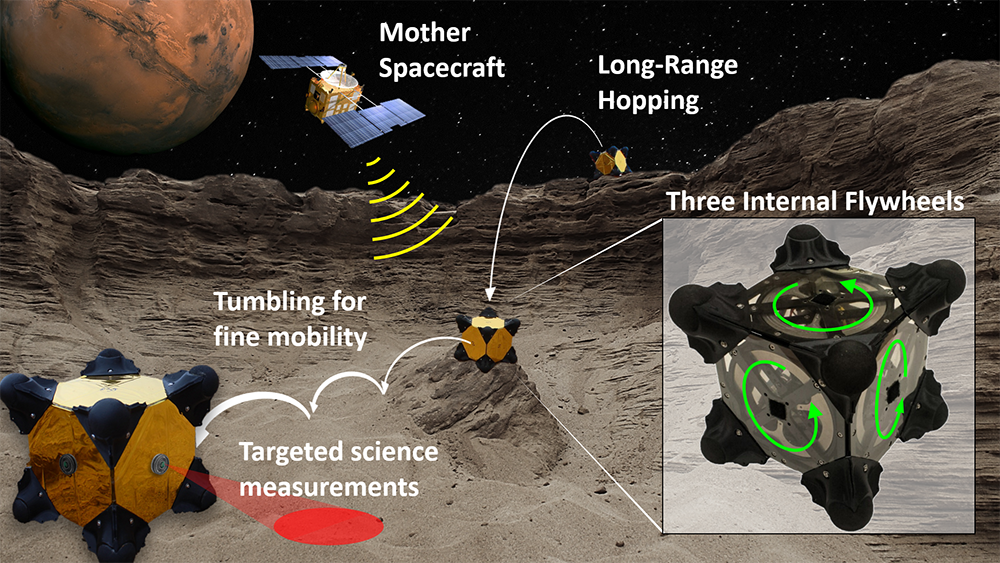
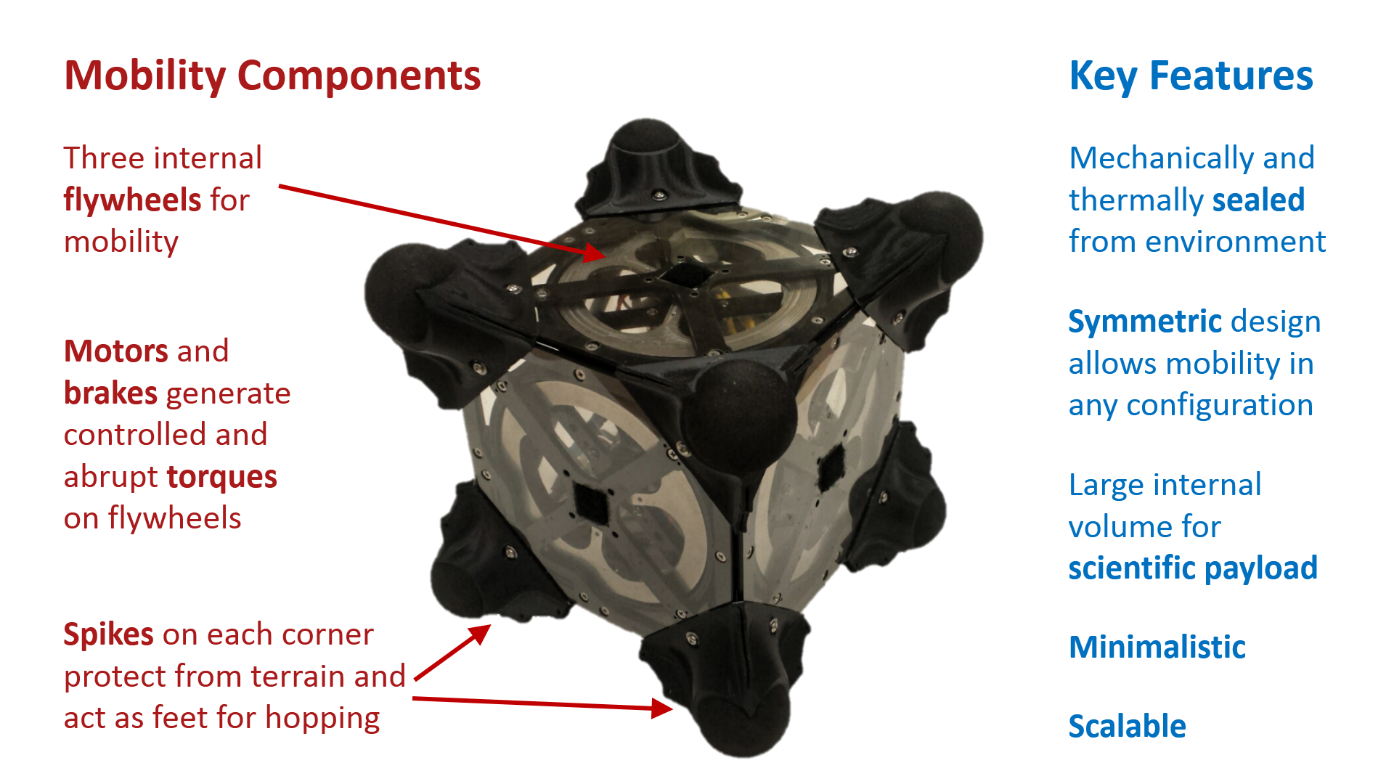
The goal of this project is to develop a mission architecture that allows the systematic and affordable in-situ exploration of small Solar System bodies, such as asteroids, comets, and Martian moons. Our architecture relies on the novel concept of spacecraft/rover hybrids, or “Hedgehogs”, which are surface mobility platforms capable of achieving large surface coverage (by attitude-controlled hops, akin to spacecraft flight), fine mobility (by tumbling), and coarse instrument pointing (by changing orientation relative to the ground) in the low-gravity environments (micro-g to milli-g) of small bodies. The actuation of the hybrids relies on spinning three internal flywheels, which allows all subsystems to be packaged in one sealed enclosure and enables the platforms to be minimalistic, thereby reducing the cost of the mission architecture.

Why explore small bodies anyway?
Asteroids and comets are some of the oldest objects in our Solar System, dating back to the early formation of the planets some 4.5 billion years ago. We can learn a lot about the origins and evolution of the Solar System by studying these ancient bodies. Also, recent observations suggest that some asteroids may be rich in resources that could be useful for in-situ utilization (spacecraft refueling and construction), or even economic return from mining precious metals. NASA and other space agencies also recognize that visiting asteroids would be a useful stepping stone for manned-missions to Mars and beyond.
A challenging environment to traverse
On Earth or even Mars, the most common way of moving around is with wheels – they are robust and relatively easy to control. On small bodies however, where gravity is 1,000 to 100,000 times lower and the surfaces are extremely rocky and irregular, traditional mobility approaches are ineffective: wheels just slip and legs need to anchor. Instead, our hopping and tumbling rovers seek to exploit these conditions through their symmetric and simplistic design.
Mission Architecture
One mother spacecraft would deploy to the surface of a small body one (or more) Hedgehog rover. Once deployed, they would hop for long-range traverses and tumble to reach specific locations for in-situ science measurements. The mother spacecraft would act as a communication relay to Earth and would aid the rovers with tasks such as localization and navigation.
Basic concept
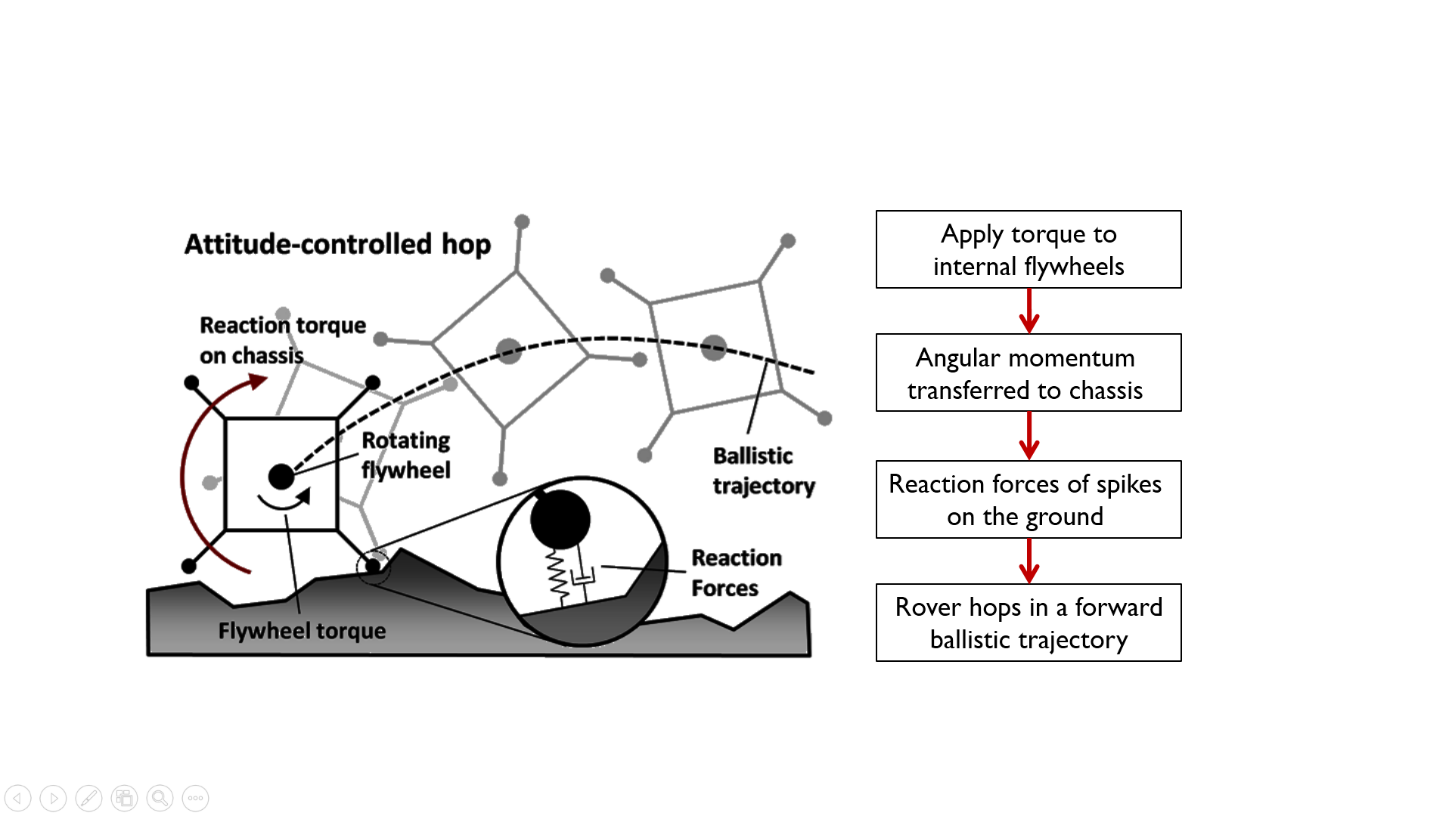
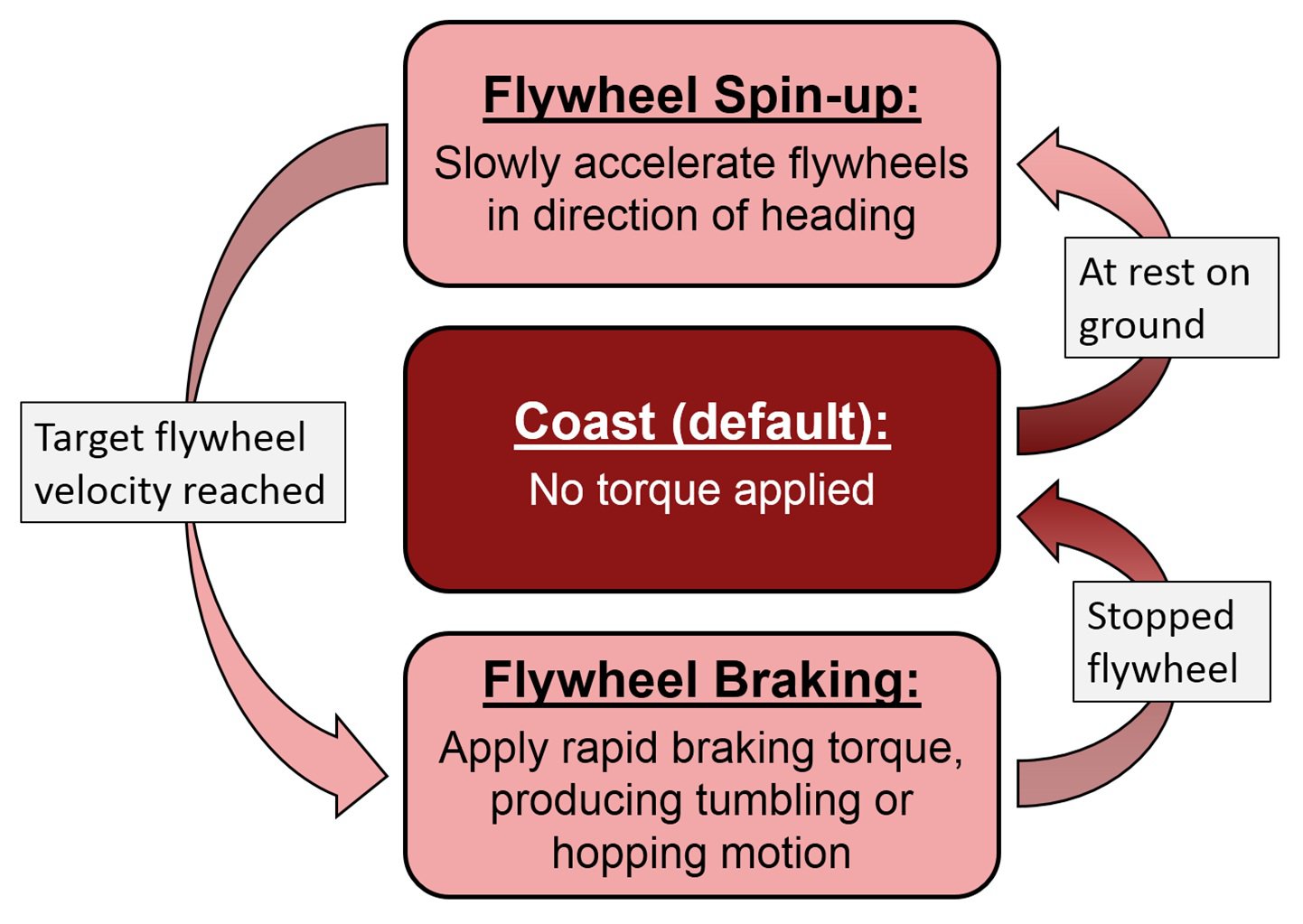
By applying a torque to the internal flywheels, the external chassis rotates in the opposite direction. With its spikes planted on the surface, the rover pushes off into a forward hopping trajectory. For distant hops requiring higher torques, the flywheels are spun up slowly and stopped quickly with mechanical brakes.
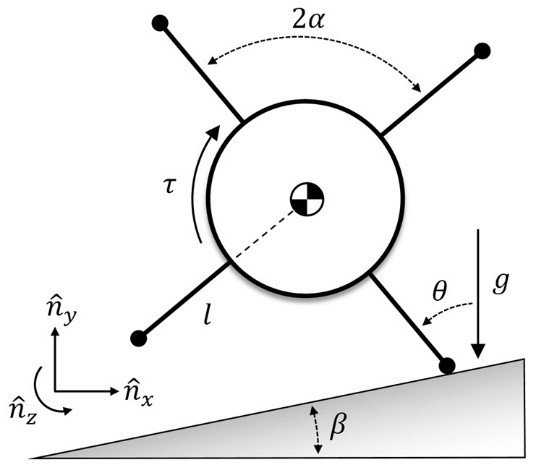
Dynamics
Studying the dynamics of these platforms in a theoretical framework allows us to better understand how their motion is affected by design and actuation. All dynamic analyses start with a model, and we have proposed various models that each lend complementary insight into this problem. Highly simplified models (e.g. left figure) can yield analytical results that are useful for predicting behavior and designing control laws, whereas more complex 3D models can better capture the physics and are useful for numerical simulations.
Control
How can we utilize the mobility system (flywheels, motors, and brakes) to move in a deliberate way? Such a problem is well understood for cars or planes, but remains largely unexplored for internally-actuated platforms, especially in microgravity. However, through a highly iterative approach of studying dynamics, simulations, and experimentation, we have refined control techniques that can reliably achieve targeted mobility.
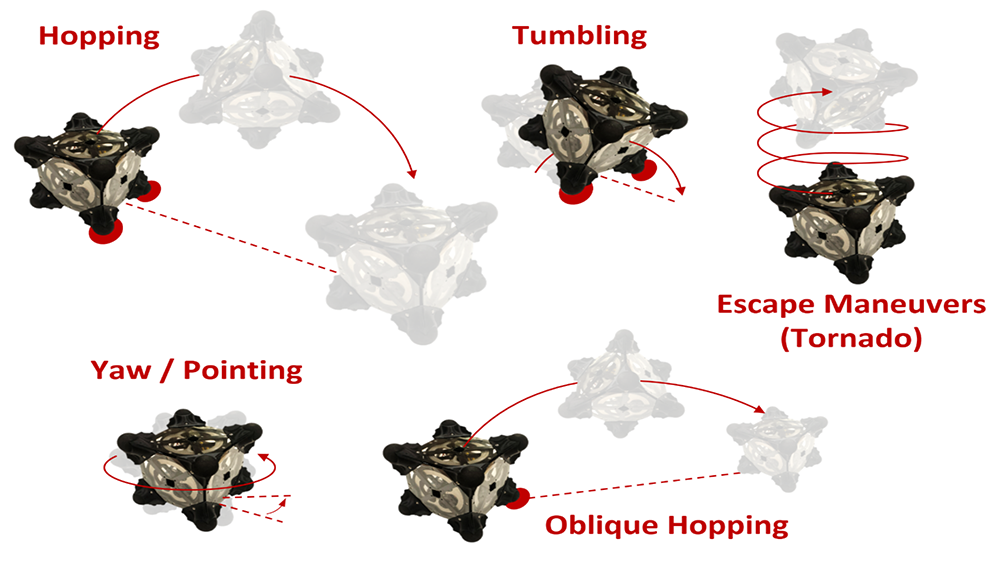
Having three orthogonal flywheels allows the rover to produce torques and generate angular momentum in any direction. This enables a wide variety of possible maneuvers or motion primitives. Hopping is the primary mode of mobility for covering large distances, which can be achieved in any direction using a combination of flywheels. On the other hand, tumbling and pointing maneuvers provide more precise control for local adjustments. Inadvertently, we’ve even discovered a high-energy maneuver that allows the rover to escape from being “stuck” in a bed of loose granular media.
While the rovers can reliably execute these motion primitives, there is still a degree of randomness and uncertainty with respect to their final landing position due to residual bouncing on highly uneven terrain. Think of it like playing golf; each subsequent stroke (hopefully) moves the ball closer to the hole. In the same way, our hybrid control strategy compensates for random errors by making a series of corrective maneuvers.
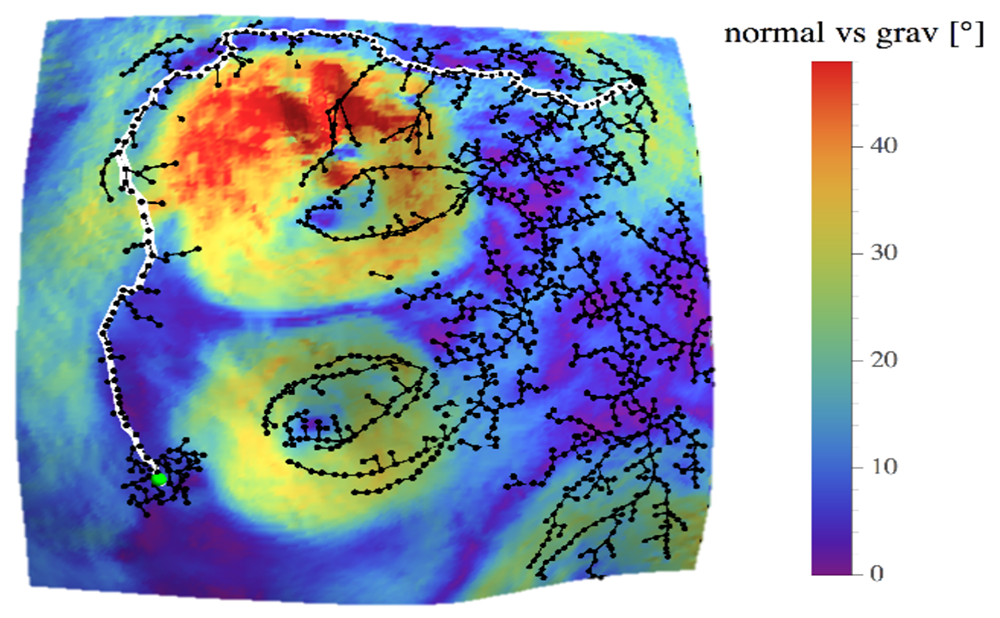
Motion Planning
When operating a spacecraft or rover in deep space, where long communication latency and blackouts are unavoidable, autonomy is required to perform time-critical tasks. For these hybrid rovers, onboard motion planning algorithms are required to navigate to specified locations without any human interaction. Enabled by recent advances in microprocessor technology, we are developing computationally tractable algorithms for planning a sequence of trajectories towards a target destination while avoiding obstacles and with regard for the uncertainty in our dynamic and environmental models.
For more information about Hedgehog, visit the JPL YouTube channel.