

Fig. 1: An industrial 7-DOF Robotics Research Corporation arm.
Technologies for robotic inspection and maintenance have been developed in the Telerobotics Laboratory. The lab has two 8-degree-of-freedom (DOF) manipulators. Robotics Research arms with 7 DOF are mounted on linear translation platforms. Redundant arm control enables reshaping of the arm configuration for a given end-effector position and orientation to maximize the arm's dexterity or enable manipulation in confined environments such as space structures. Multiple modes of shared and supervisory control are possible between the manipulators and a remote human operator.
Traditional industrial robotic arms have 6 DOF, providing positioning and orientation of the end-effector. This capability is adequate for simple industrial applications where the robot is used for pick-and-place operations in a well-structured obstacle-free environment. The human arm, on the other hand, has an extra DOF relative to industrial arms (total of 7 DOF). Similar to human capability, the typical 7-DOF robot-arm design consists of a roll-pitch joint at the shoulder, a roll-pitch joint at the elbow, and a roll-pitch-yaw joint at the wrist. The advantages of this design are:
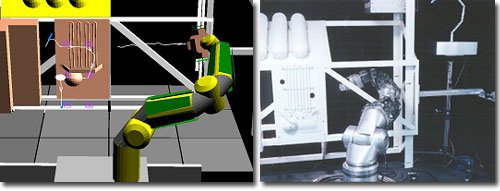
Fig. 2: Simulated and actual manipulation in a constrained environment utilizing model-based and redundant arm-control modes in the Telerobotics Laboratory. The white traces on the simulated figure show planned or actual traverse paths of the end effector.
Dexterous 7-DOF arms are ideally suited for a variety of robotic tasks that include, but are not limited to:
JPL has been an source of innovation for control algorithms for 7-DOF arms and their space applications, resulting in numerous publications and patents (1, 2).