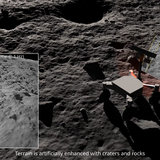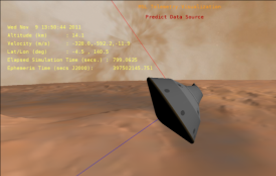
Figure: FLOATS - A DARTS package for simulating the dynamics and thermodynamics of buoyant aerial platforms (aerobots)
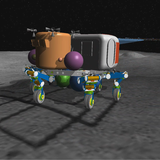
The Mobility and Robotic Systems Section's Dynamics And Real-Time Simulation (DARTS) Laboratory develops advanced high-fidelity, multi-mission modeling and simulation tools for the closed-loop development and testing of autonomous spaceflight systems. The lab supports lander/orbiter flight dynamics, surface and near-surface mission domains, and also adapts its tools to specific missions, projects, and technology development activities.
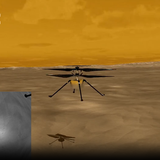
DARTS Lab tools can typically be used in workstation environments as well as for real-time, hardware-in-the-loop simulations for the testing and verification of flight software and hardware. The DARTS Lab simulation capabilities have been widely used by various missions including Galileo, Cassini, Deep Space 1, Stardust, Space Interferometry Mission, Terrestrial Planet Finder, Mars Exploration Rover, Phoenix, Mars Science Laboratory, InSight, Mars 2020, Ingenuity (Mars Helicopter) and the NASA ARTEMIS program including SLS, Orion and ISS project applications. The simulation capabilities are also in active use for a variety of advanced technology-development activities across multiple-domains including for ground vehicle, robotics, aero-capture, rotorcraft, planetary balloon, autonomous sampling, molecular dynamics research and technology development etc

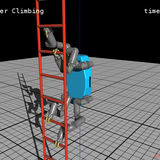
The DARTS Lab also continues to pioneer the development of the Spatial Operator Algebra (SOA) methodology for minimal coordinate, structure-based dynamics of multibody systems. The dynamics algorithms from this methodology are applicable to the broad class of dynamics problems including multibody systems with rigid and flexible bodies, with branched and closed-graph topologies, non-smooth contact and collision dynamics etc. The recursive algorithms are the fastest available and, being structure-based, allow for time-varying configurations and topologies. These algorithms form the basis of the DARTS multibody dynamics software at the heart of the simulation tools.
Key simulation tools available at the DARTS Lab include the following:
More information and links to publications can be found at the DARTS Lab website.
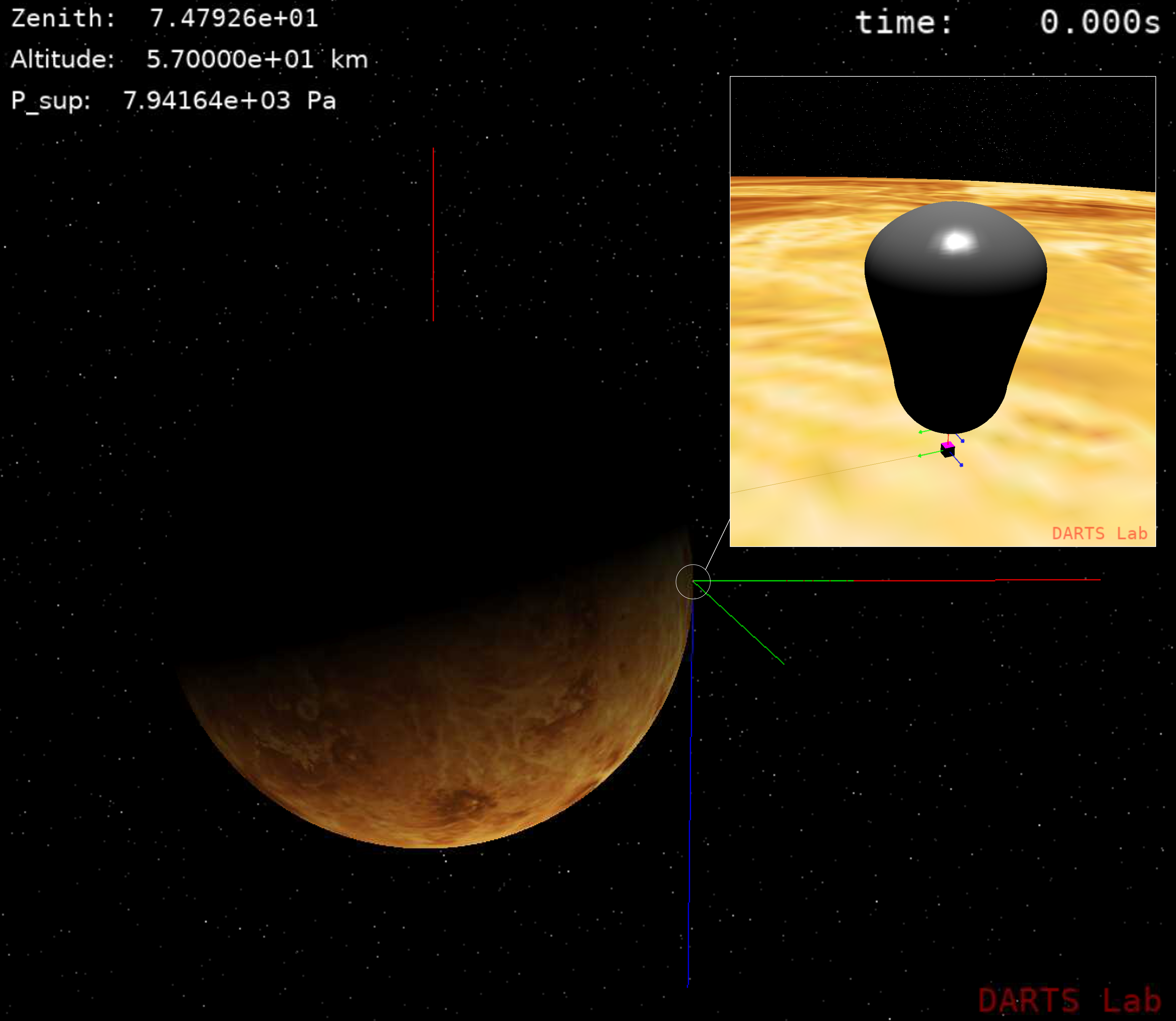
Figure: FLOATS - A DARTS package for simulating the dynamics and thermodynamics of buoyant aerial platforms (aerobots)