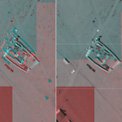
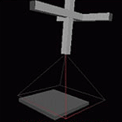
Fig. 1: 5 DoF gantry provides position control with ground truth measurements.
The JPL Machine Vision Lab supports development and testing of vision algorithms for a variety of applications, including rover navigation, safe and precise landing, orbit determination, mapping from orbit, and others. The lab has supported algorithm development and testing for the Mars Exploration Rover and Mars Science Lab missions, numerous technology-development tasks under the Mars Technology Program and other NASA-related technology programs, and robotic-vehicle projects funded by the Defense Advanced Research Projects Agency (DARPA), the Army Research Laboratory, and other Department of Defense sponsors.
Facilities in the lab include the usual range of networked desktop and laptop computers and printers, space for small-project team meetings, workbenches for assembly and maintenance of electronic components, specialized equipment to support vision research, and small robotic ground- and air-vehicle test beds.
Specialized equipment for vision research includes a variety of cameras in visible and thermal-infrared wavelengths, an optical bench with translation stages for acquiring image sequences with precise ground truth on camera or object motion, and a camera "gantry" test bed, which is a five-degree-of-freedom camera-motion device that enables image acquisition for small-scale emulation of orbiting and landing trajectories.
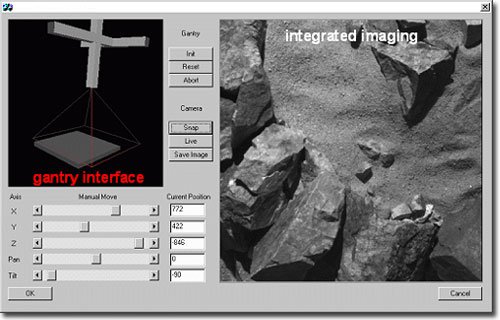
Fig. 2: User interface allows interactive control of gantry position.
Other vision-related equipment includes a "total station" laser-based survey instrument for accurate calibration of cameras and camera-to-robot transformations, GPS receivers and inertial measurement units for accurate ground-truth measurement of robot motion in visual-motion estimation tasks, and a variety of embedded computing hardware to support system integration of vision algorithms into robotic vehicles. The lab is also equipped for testing class 3B laser systems, such as near-infrared lidar. Robotic vehicle test beds associated with the lab include an autonomous helicopter, a variety of small wheeled and tracked ground vehicles, and a robotic HMMWV (High-Mobility Multi-Wheeled Vehicle, also known as "humvee").