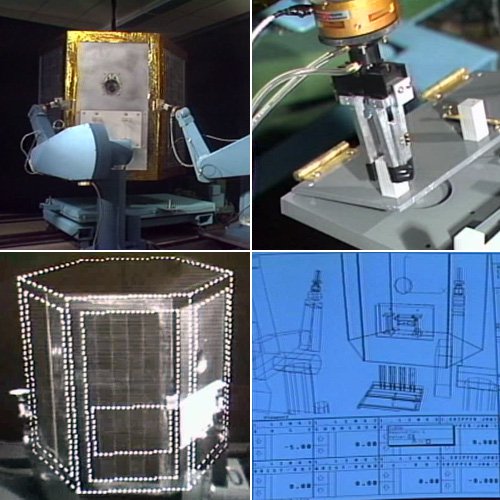
Shown is a demonstration of a prototype system for robotic satellite servicing. Highlighted subsystems include a graphical user interface for telemetry and sequencing, a three manipulator system with dual-arm control and stereo camera positioning, and a vision system for matching environmental models to imagery. Specific capabilities shown are tracking and capture of a rotating satellite, and manipulation of an auxiliary task board. (11:30)