Skip Navigation
NASA
Jet Propulsion Laboratory
California Institute of Technology
JPL Robotics
Home
Who We Are
Groups
People
What We Do
Applications
Flight Projects
Research Tasks
Charter
How We Do It
Systems
Facilities
Gallery
Achievements
Publications
Patents
Awards
Careers
News
Home
>
Gallery
>
Simulation: Vision
Gallery
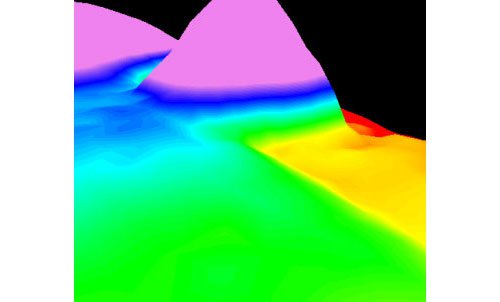
Simulation: Vision
05/31/2006
Stereo vision results computed from simulated imagery, resulting in an elevation map of the simulated terrain in front of the simulated rover.
Application:
Modeling & Simulation