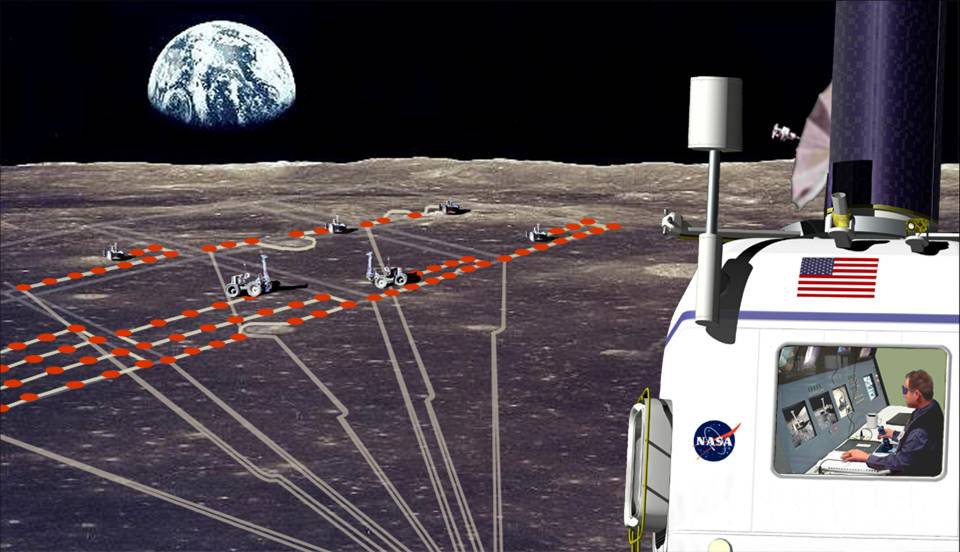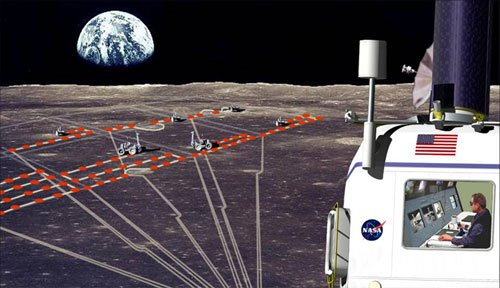
Artist conception of multi-robot remote supervision on the Moon.
The objective of this project is the development of a Robot Supervision Architecture (RSA), a telesupervisory control system for multiple, substantially autonomous robots. RSA will allow a single operator, either on Earth, in orbit, or on a lunar/planetary surface to supervise a crew of robots performing inspection, exploration, prospecting or assembly tasks. The capabilities of RSA will be demonstrated in a wide-area prospecting system called PRoSPECT: telePresence Robotic System for Prospecting and Exploitation of Crucial Terrain. PRoSPECT will support robust and highly efficient surveying for in-situ resource utilization on the Moon or Mars, using a crew of rovers being supervised by astronauts in a shirt-sleeve, low-risk environment.
JPL has a co-investigation role for this work, which is led by
John Dolan of Carnegie Mellon University.