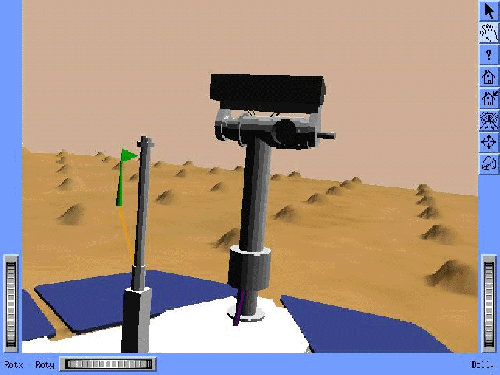
Simulated rock grid used to verify that the MER navigation algorithm, GESTALT, can detect and circumvent specific obstacles. Tests varied the size and spacing of obstacles, as well as the start pose and goal position.
This task responds to the initiative's goals of "enabling transitioning of mission relevant engineering applications to JPL's new high performance cluster computer." This work will develop capabilities to allow the use of JPL's new HPC cluster by the MSL project for key performance/risk simulations for the surface exploration domain. This task is also responsive to the initiative's goal of "establishing new collaborations in the high performance computing area."
Currently closed-loop rover simulations are designed to run on single workstations and testbeds. There is no existing capability to run such rover simulation studies on the institutional HPC clusters.

