
JPL’s Robotics Section operates a diverse fleet of small Unmanned Aircraft Systems (sUAS) to conduct research and develop new technologies with the goal to enable fully autonomous operation of aerial vehicles in planetary and Earth science applications.

Figure 1: JPL built Micro Air Vehicle
Our vehicles vary in sizes - from Micro Air Vehicles that fit in the palm of a hand (Figure 1) - up to larger vehicles designed to carry multi-kilogram payloads for evaluation and testing of new avionics hardware or novel science instruments during field campaigns.

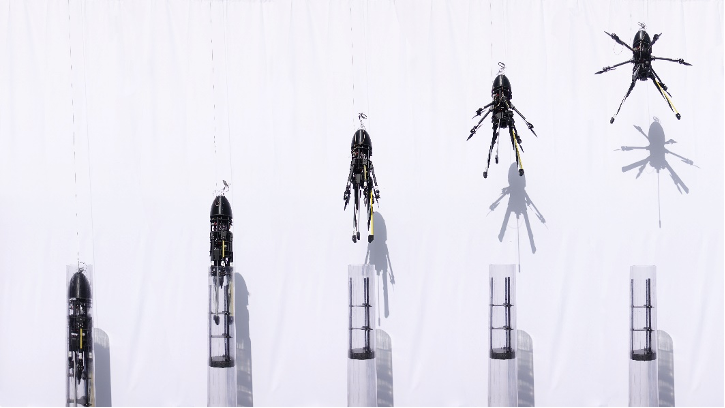
Figure 2: JPL Micro Air Vehicle performing Terrain Relative Navigation
While most of our UAS are based on commercial-off-the-shelf (COTS) platforms augmented with additional hardware such as sensors and on-board computation, JPL also designs and builds aerial platforms to evaluate new aerial mobility concepts (Figure 1 – Micro quadrotor, Figure 4 – Rollercopter, Figure 5 - SQUID).

Our research for aerial mobility includes:
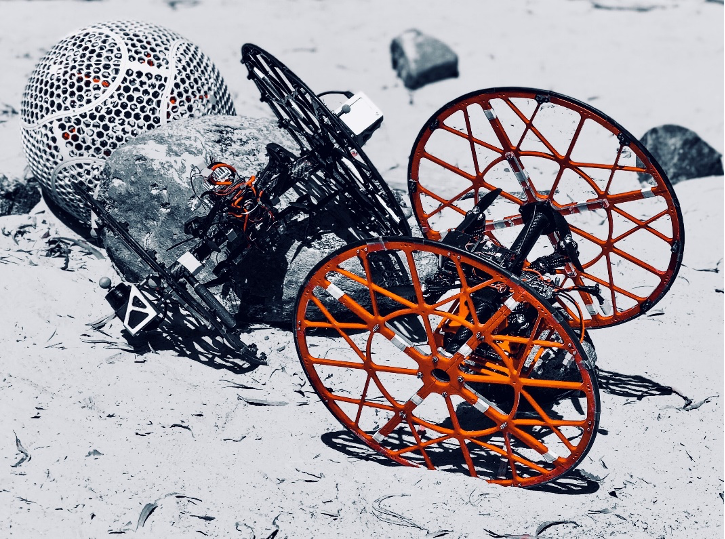
Figure 4: JPL build UAS: Various iterations of “Rollercopters”
With the vision to enable these versatile platforms to conduct fully autonomous science missions without human interaction – on Earth and other bodies in our solar system with an atmosphere to support flight.

VulcanUAS Harrier6 55lbs class UAS (to be updated with Lab access)