
Mini DuAxel is the latest addition to the Axel family of rovers, designed to extend planetary mobility to steep and rugged terrains otherwise inaccessible to existing planetary rovers. At the core of the family is Axel, a two-wheeled tethered vehicle designed to rappel down highly sloped terrain. DuAxel was developed to overcome the range limitation of Axel’s tethered design by connecting two Axel rovers into an independent 4-wheel rover capable of traversing long distances. Upon reaching a steep slope or cliff, DuAxel can anchor itself and deploy a tethered Axel rover for extended exploration.
Mini DuAxel is a 1:3 scale mobility testbed of DuAxel, able to move with the same degrees of freedom and ranges of motion. However, unlike its larger counterpart, Mini DuAxel’s small form factor enables it to be used for testing in controlled environments.
To test the rover's mobility on steep terrain, researchers use a lunar simulant with mechanical properties similar to the regolith astronauts observed during the Apollo missions. The simulant can be formed into slopes of varying angles up to 30 degrees to simulate the conditions that the full-scale rover could encounter on a lunar mission.
Development of the system commenced in September 2022, with initial experiments starting in March 2023.
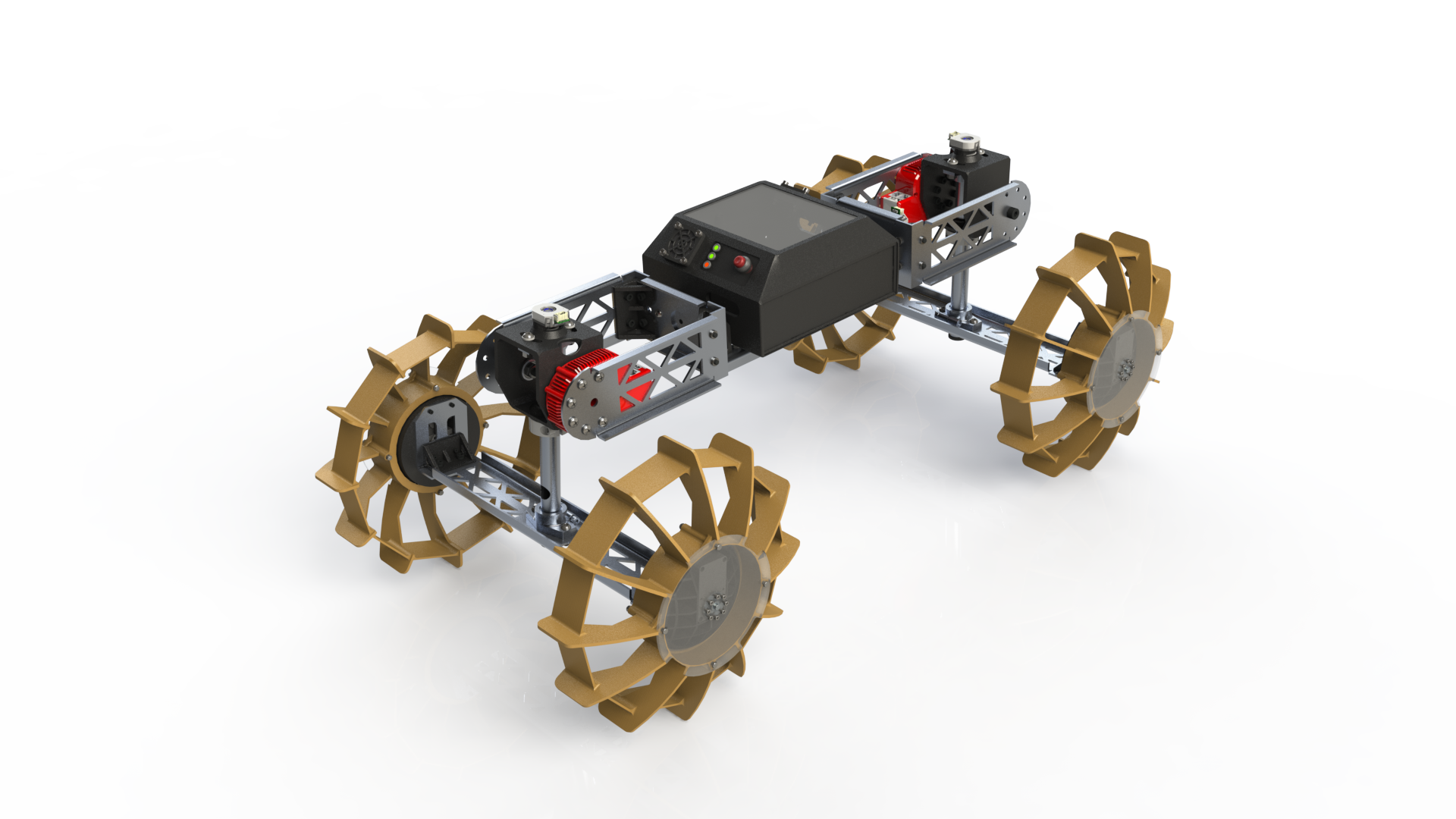
CAD Render
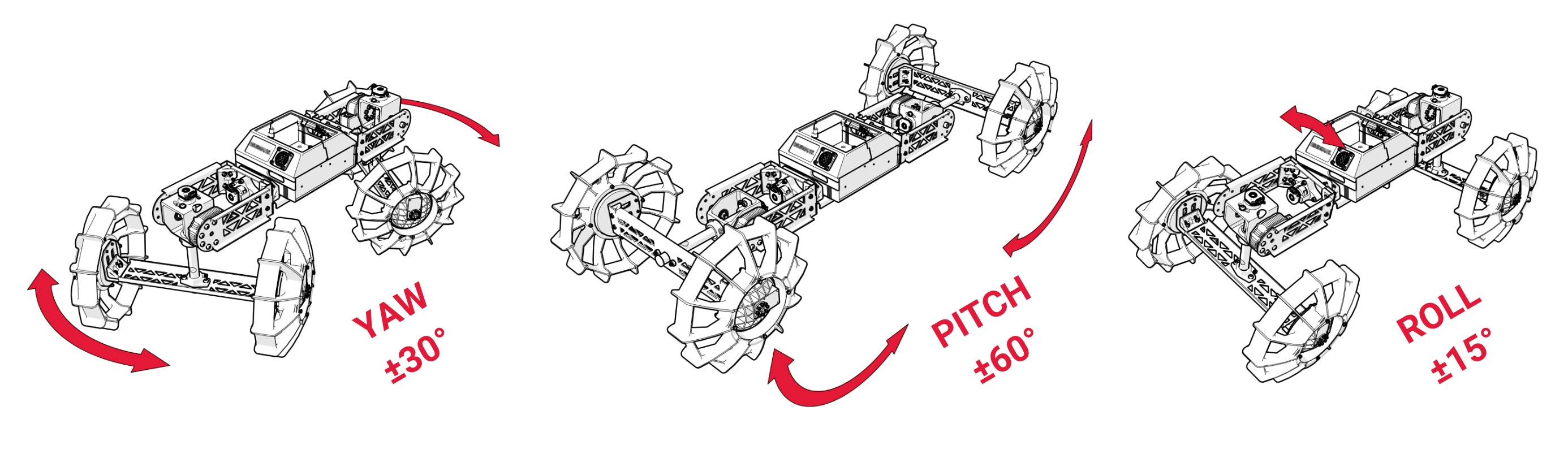
Degrees of Freedom
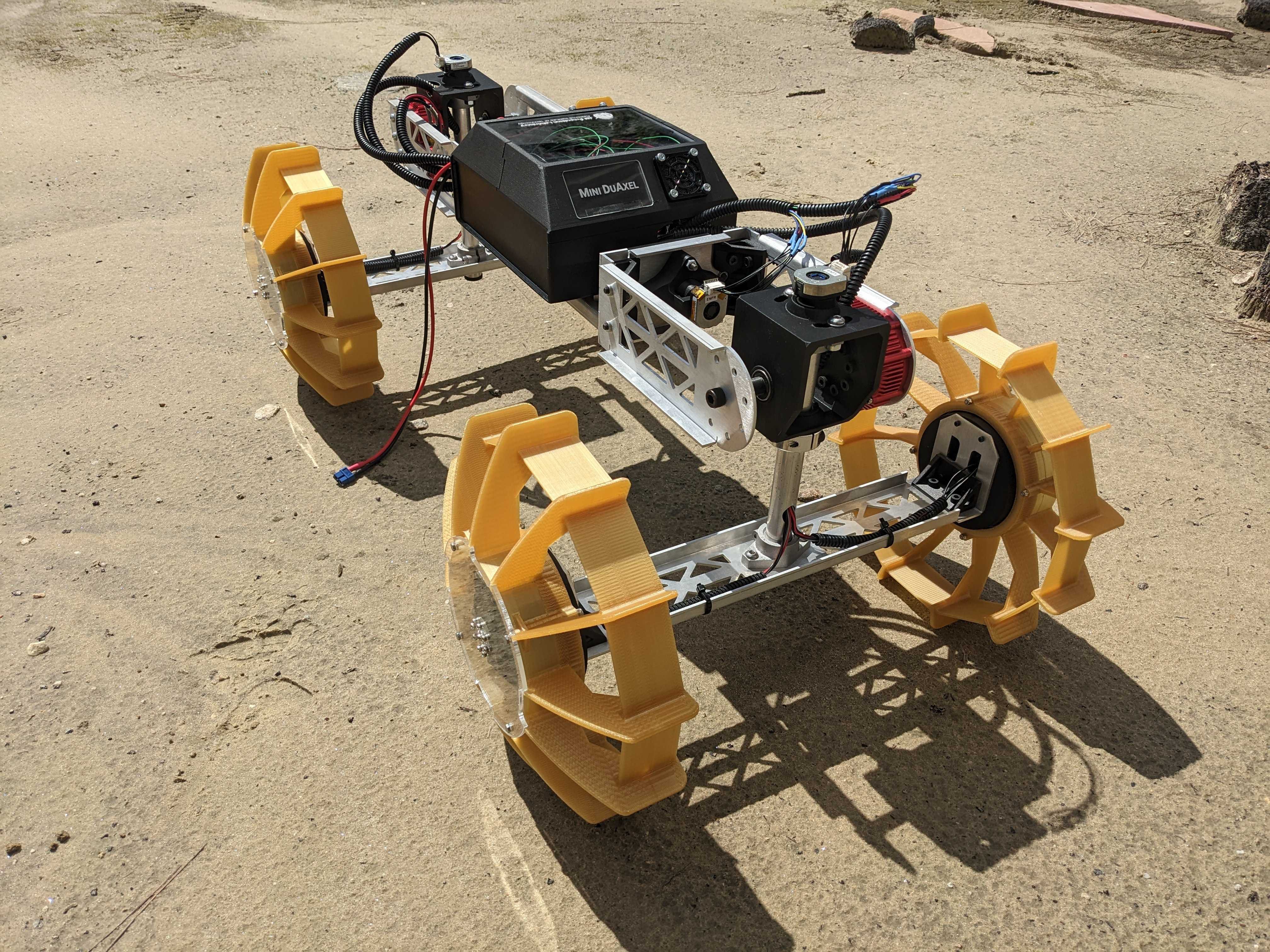
Mini DuAxel on the JPL Mini Mars Yard

Mini DuAxel developer, Matthew Suntup, preparing a 25° slope of GRC-1 lunar simulant

Mini DuAxel climbing a 25° slope of GRC-1 lunar simulant

Mini DuAxel rear wheel sinkage moving up a 30° slope of GRC-1 lunar simulant at 0.144m/s

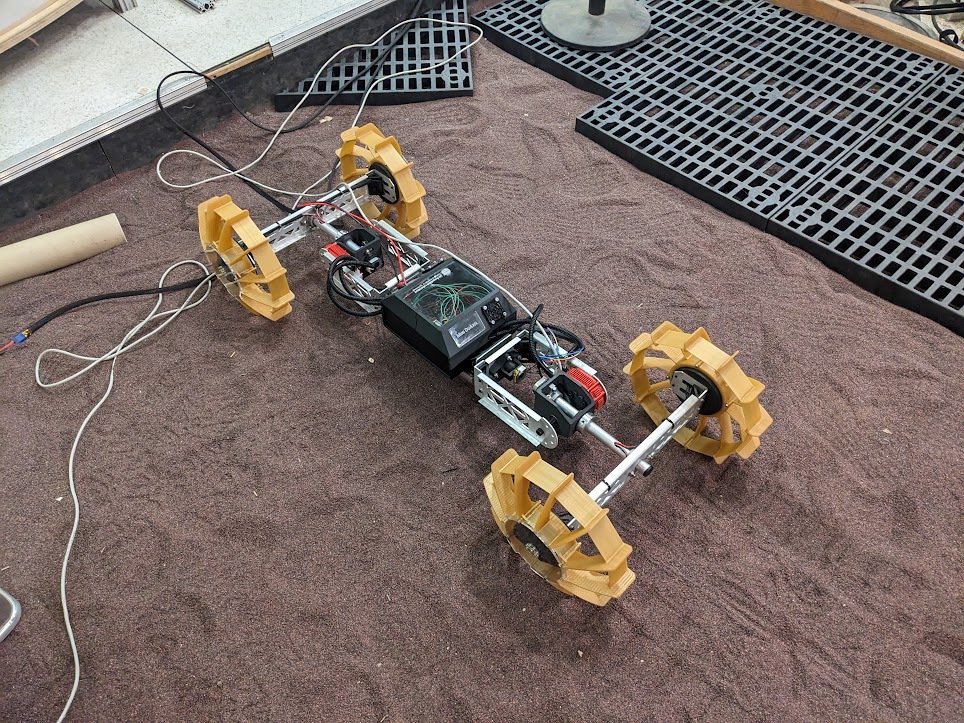
Matthew Suntup running performance tests on Mini DuAxel in the Mini Mars yard with a motion tracking system.
Rover set to 90º pitch angles in red garnet test location