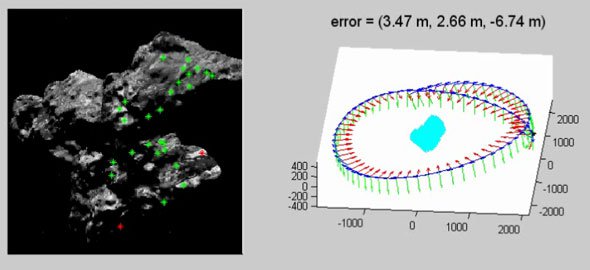
Landmark-based spacecraft-orbit determination. Left pane: Imagery with detected landmarks shown. Red = rejected as outlier. Green = accepted. Right pane: Recovered position overlaid on ground-truth trajectory. Vision-based position errors are shown for each frame.