
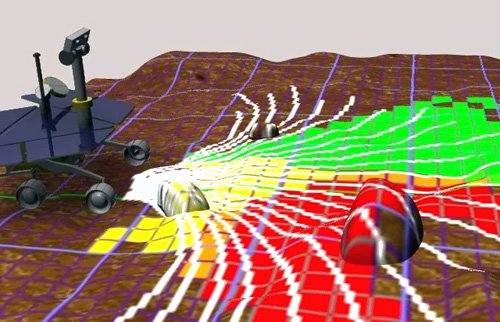
Overview of the Mars Exploration Rovers navigation algorithm, GESTALT, including explanations of stereo vision, traversability analysis, path selection and driving. GESTALT is an acronym for Grid-based Estimation of Surface Traversability Applied to Local Terrain. (5 min)